
Принцип работы стеклоподъемников по кан шине
Добавил пользователь Евгений Кузнецов Обновлено: 19.09.2024
Беспилотный автомобиль StarLine на платформе Lexus RX 450h — научно-исследовательский проект, стартовавший в 2018 году. Проект открыт для амбициозных специалистов из Open Source Community. Мы предлагаем всем желающим поучаствовать в процессе разработки на уровне кода, опробовать свои алгоритмы на реальном автомобиле, оснащенном дорогостоящим оборудованием. Для управления автомобилем было решено использовать Apollo, открытый фреймворк. Для работы Apollo нам необходимо было подключить набор модулей. Эти модули помогают программе получать информацию об автомобиле и управлять им по заданным алгоритмам.
К таким модулям относятся:
- модуль позиционирования автомобиля в пространстве с помощью GPS-координат;
- модуль управления рулем, ускорением и торможением авто;
- модуль состояния систем автомобиля: скорость, ускорение, положение руля, нажатие на педали и т.д.;
- модуль получения информации об окружении автомобиля. С этим справятся ультразвуковые датчики, камеры, радары и лидары.
Теоретическая часть
Что такое CAN-шина
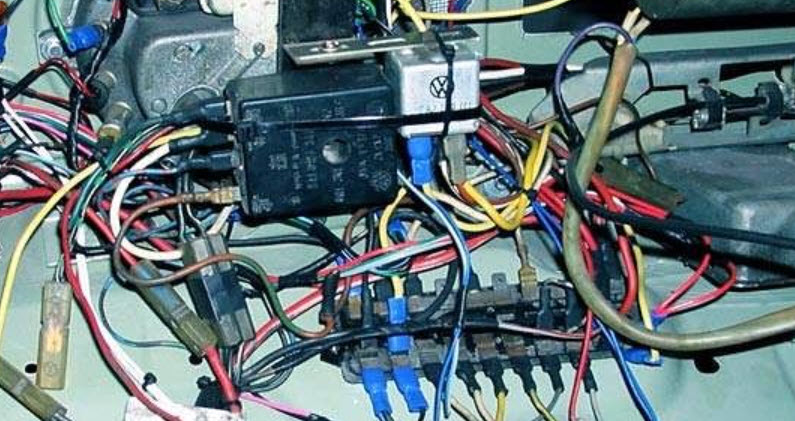
В современных автомобилях управление всеми системами взяли на себя электронные блоки (Рис. 1.). Электронные блоки — это специализированные компьютеры, каждый из которых имеет все необходимые интерфейсы для интеграции с автомобилем. С помощью цифровых интерфейсов связи, блоки объединяются в сеть для обмена информацией друг с другом. Самые распространенные цифровые интерфейсы в автомобилях — CAN, LIN, FLEXRay. Из них наибольшее распространение получил именно CAN.

Рис. 1. Шина CAN автомобиля.
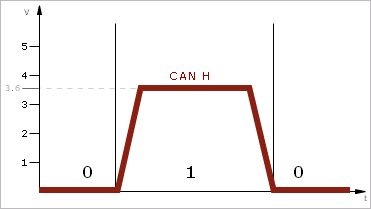
На физическом уровне шина представляет собой витую пару из медных проводников. Сигнал передается дифференциально, за счет чего достигается высокая помехоустойчивость.

Рис. 2. Физическое представление сигнала в CAN шине
Посредством CAN шины можно получать информацию о состоянии различных датчиков и системах автомобиля. Также по CAN можно управлять узлами автомобиля. Именно эти возможности мы и используем для своего проекта.
Мы выбрали Lexus RX, потому что знали, что сможем управлять всеми необходимыми узлами по CAN. Так как самое сложное при исследовании автомобиля — это закрытые протоколы. Поэтому одной из причин выбора именно этой модели авто стало наличие описания части протокола CAN-шины в opensource-проекте Openpilot.
Правильно управлять автомобилем — означает понимать, как работают механические части систем автомобиля. Нам было необходимо хорошо понимать, как правильно работать с электроусилителем или управлять замедлением автомобиля. Ведь, например, при повороте колеса создают сопротивление на рулевое управление, что вносит свои ограничения на управление при повороте. Некоторые системы невозможно использовать без ввода авто в специальные рабочие режимы. Эти и другие детали нам пришлось изучать в процессе работы.
Электроусилитель руля
Электроусилитель устанавливается на рулевой вал автомобиля, части которого соединены между собой торсионным валом. На торсионный вал устанавливается датчик величины крутящего момента (Torque Sensor). При вращении руля происходит скручивание торсионного вала, которое регистрируется датчиком момента. Данные, полученные от датчика момента, датчиков скорости и оборотов коленвала, поступают в электронный блок управления ECU. А ECU, в свою очередь, уже вычисляет необходимое компенсационное усилие и подает команду на электродвигатель усилителя.

Рис. 3. Схематичное изображение системы электроусилителя руля
Видео: cистема LKA рулит автомобилем с помощью системы EPS.
Электронная педаль газа
Дроссельная заслонка — это механизм регулировки количества топливной смеси, которая попадет в двигатель. Чем больше смеси попадет, тем быстрее едет автомобиль.
Электронная педаль газа — это система, которая задействует работу нескольких электронных узлов. Сигнал о положении педали, при ее нажатии, поступает в блок управления двигателем ECM (Engine Control Module). ECM, на основе этого сигнала, рассчитывает необходимое количество топлива, которое нужно подать в двигатель. В зависимости от необходимого количества топлива, ECM регулирует угол открытия дроссельной заслонки.

Рис. 4. Система электронной педали газа.
Видео: Для работы круиз-контроля используется управление электронной педалью газа.
Электронные системы помощи водителю
Мы купили автомобиль, который оборудован множеством цифровых блоков и систем помощи водителю (ADAS). В нашем проекте мы используем LKA, ACC и PCS.
LKA (Lane Keep Assist) — это система удержания в полосе, которая состоит из фронтальной камеры и вычислительного блока. LKA удерживает автомобиль в полосе движения, когда водитель, например, отвлекся. Алгоритмы в вычислительном блоке получают данные от камеры и на их основе принимают решение о состоянии автомобиля на дороге. Система способна понимать, что автомобиль неконтролируемо движется к правой или левой полосе. В таких случаях подается звуковой сигнал для привлечения внимания водителя. При пересечении полосы система сама скорректирует угол поворота колес так, чтобы автомобиль остался в полосе движения. Система должна вмешиваться только в том случае, если осознает, что маневр между полосами движения не был вызван действием водителя.
ACC (Adaptive Cruise Control) — система адаптивного круиз-контроля, который позволяет выставить заданную скорость следования. Автомобиль сам ускоряется и притормаживает для поддержания нужной скорости, при этом водитель может убрать ногу с педалей газа и тормоза. Этот режим удобно использовать при езде по скоростным магистралям и автострадам. Адаптивный круиз контроль способен видеть препятствия впереди автомобиля и притормаживать для избежания столкновения с ними. Если впереди автомобиля едет другое транспортное средство с меньшей скоростью, ACC сбавит скорость и будет следовать за ним. При обнаружении статичного объекта, ACC сбавит скорость до полной остановки. Для обнаружения объектов перед автомобилем такая система использует радар с миллиметровым диапазоном длин волн. Обычно такие радары работают на частоте 24-72 ГГц и способны уверенно видеть объекты на расстоянии до 300 метров. Радар обычно установлен за передним значком на решетке радиатора.
PCS (Pre-Collision System) — система предотвращения столкновения. Система призвана предотвратить столкновение с автомобилем, который движется впереди. При неизбежности столкновения, система минимизирует урон от столкновения. Здесь так же используются радар для оценки расстояния до объекта и фронтальная камера для его распознавания. Фронт PCS прогнозирует вероятность столкновения на основе скорости автомобиля, расстояния до объекта и его скорости. Обычно у системы есть два этапа срабатывания. Первый этап — система звуком и индикацией на приборной панели оповещает об опасности водителя. Второй этап — активируется экстренное торможение с помощью системы ABS, и включаются преднатяжители ремней безопасности.
Практическая часть
Управление рулем
Первое, что захотелось сделать нашей команде, — это научиться рулить. Рулем в автомобиле могут управлять две системы: парковочный ассистент IPAS (Intelligent Park Assist) и LKA.
IPAS позволяет задавать напрямую угол поворота рулевого колеса в градусах. Так как в нашем автомобиле нет данной системы, проверить и освоить рулевое управление таким способом нельзя.
Поворот руля влево на 360 градусов
Поворот руля вправо на 270 градусов

Рис. 5. Команда управления рулем с помощью системы LKA
На графике (Рис. 6.) представлена диаграмма работы LKA. Torque Sensor — значение с датчика момента на торсионном валу. Torque Cmd — команда от LKA для управления рулем. Из картинки видно, как происходит подруливание LKA для удержания автомобиля в полосе. При переходе через ноль меняется направление поворота руля. Т.е. отрицательное значение сигнала говорит о повороте вправо, положительное — влево. Удержание команды в нуле говорит об отсутствии управления со стороны LKA. При вмешательстве водителя, система перестает выдавать управление. О вмешательстве водителя LKA узнает с помощью второго датчика момента на валу со стороны рулевого колеса.

Рис. 6. График работы системы LKA
Нам предстояло проверить работу команды управления рулем. С помощью модуля StarLine Сигма 10 мы подготовили прошивку для проверки управления. StarLine Сигма 10 должен выдавать в CAN-шину команды на поворот руля влево или вправо. На тот момент у нас не было графического интерфейса для управления модулем, поэтому пришлось использовать штатные средства автомобиля. Мы нашли в CAN-шине статус положения рычага круиз-контроля и запрограммировали модуль таким образом, что верхнее положение рычага приводило к повороту руля вправо, нижнее положение — к повороту влево (Рис. 7).
Рис. 7. Первые попытки рулить
На видео видно, что управление осуществляется короткими секциями. Это возникает по нескольким причинам.
Первая из причин — это отсутствие обратной связи. Если расхождение между сигналом Torque Cmd и Torque Sensor превышает определенное значение Δ, система автоматически перестает воспринимать команды (Рис. 8). Мы настроили алгоритм на корректировку выдаваемой команды (Torque CMD) в зависимости от значения момента на валу (Torque Sensor).

Рис. 8. Расхождение сигнала приводит к ошибке работы системы
Следующее ограничение связано с системой защиты встроенной в EPS. Система EPS не позволяет командами от LKA рулить в широком диапазоне. Что вполне логично, т.к. при езде по дороге резкое маневрирование не безопасно. Таким образом, при превышении порогового значения момента на валу, система LKA выдает ошибку и отключается (Рис. 9).

Рис. 9. Превышение порогового значения регулировки момента на валу
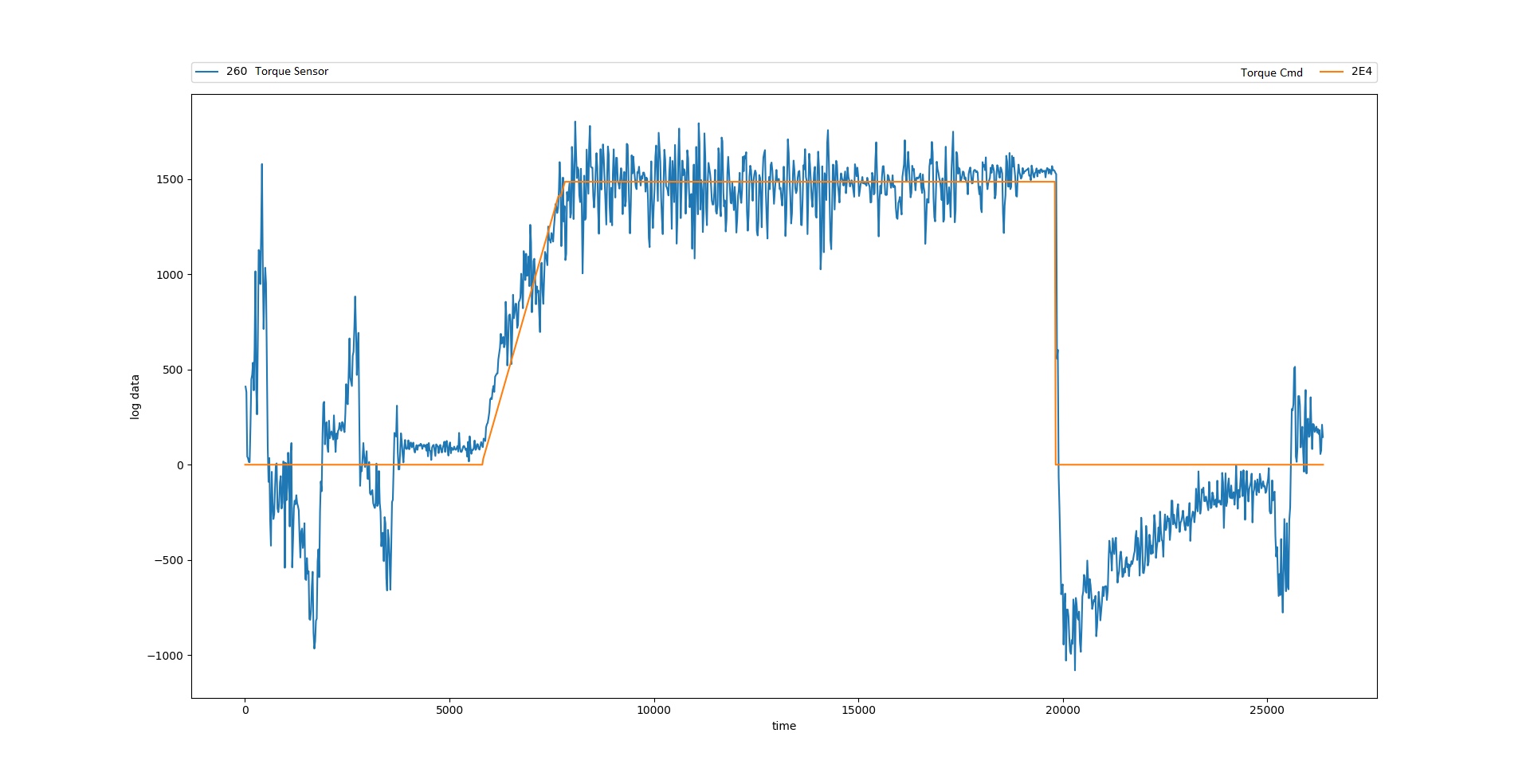
Рис. 11. Плавная регулировка поворота руля без ошибок
Управление газом
Система адаптивного круиз-контроля ACC управляет ускорением и торможением программно по CAN-шине. Блок управления двигателем ECU принимает команды DSU, если необходимо ускориться — активирует электронную педаль газа. Для торможения автомобиля используется рекуперативное торможение. При этом на торможение и ускорение используется одна команда, отличаются только значения.
Команда управления ускорением или замедлением представлена на рисунке 12. Она состоит из величины ускорения ACCEL_CMD, пары служебных бит и контрольной сумма Checksum. Для ускорения автомобилем значение ACCEL_CMD положительное, для замедления — отрицательное. Ускорение задается в диапазоне от 0 до 3 м/с^2, замедление аналогично, но со знаком минус. Для отправки данных в шину необходимо пересчитать желаемое ускорение или замедление с коэффициентом 0,001. Например, для ускорения 1 м/с^2, ACCEL_CMD = 1000 (0x03E8).

Рис. 12. Команда управления ускорения/замедления автомобиля
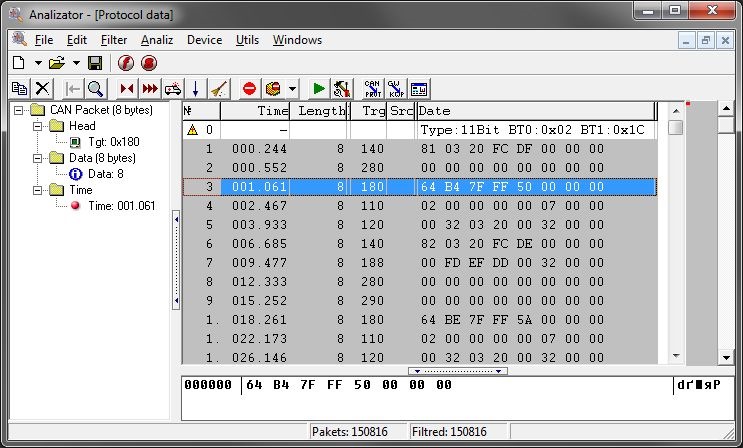
Мы сняли логи со штатной системы ACC и проанализировали команды. Сравнили с имеющимся у нас описанием команд и приступили к тестированию.
Рис. 13. Лог управления ускорением/замедлением системы адаптивного круиз-контроля ACC (выделено маркером)
Здесь не обошлось без трудностей. Мы выехали на дорогу с оживленным трафиком для тестирования команды ускорения. Команды управления ускорением или замедлением автомобиля работают только при активированном круиз контроле, не достаточно активировать его кнопкой. Необходимо найти движущийся впереди автомобиль и включить режим следования за ним.
Рис. 14. Активация круиз контроля происходит при наличии впереди другого траснпортного средства
С помощью модуля StarLine Сигма 10 посылаем команду ускорения, и автомобиль начинает набирать скорость. К этому моменту мы подключили графический интерфейс для управления модулем StarLine Сигма 10. Теперь мы управляем рулем, ускорением и торможением с помощью кнопок в приложении.
Команды работали до тех пор, пока не потеряли автомобиль впереди. Система круиз-контроля отключилась, а следовательно, и команды ускорения перестали работать.
Мы приступили к исследованию возможности использовать команды без активного круиз-контроля. Пришлось много времени потратить на анализ данных в шине CAN, чтобы понять как создать условия для работы команд. Нас интересовало, в первую очередь, какой блок блокирует выполнение команд ACC на ускорение или замедление. Пришлось изучить какие ID идут от DSU, LKA, радара и камеры, подсовывая липовые данные различных датчиков.
Наша идея заключалась в подмене данных радара. Мы сняли лог следования за автомобилем, вытащили из него данные радара в момент следования. Теперь, после включения круиз-контроля, мы посылаем фейковые данные о наличии впереди идущего авто. Получается обманывать наш автомобиль, говоря что впереди движется другое авто на конкретном расстоянии.
a) б)
Рис. 15. Активация круиза: a) попытка активировать без подмены данных радара; б) активация при подмене данных от радара.
Когда запускаем нашу обманку, на приборной панели загорается значок наличия впереди идущего автомобиля. Теперь мы можем тестировать наше управление. Запускаем команду на ускорение, и автомобиль начинает быстро ускоряться.
Как мы уже узнали, команда на ускорение и замедление одна. Поэтому тут же проверили и замедление. Поехали на на скорости с активным круиз-контролем, запустили команду на торможение, и авто сразу же замедлилось.
В итоге сейчас получается разгонять и замедлять автомобиль именно так, как нам было нужно.
Что еще мы используем
Для создания беспилотника необходимо управление вспомогательными системами: поворотниками, стоп-сигналами, аварийной сигнализацией, клаксоном и пр. Всем этим так же можно управлять по CAN шине.
Оборудование и ПО
Для работ с автомобилем сегодня мы используем набор различного оборудования:
Беспилотный автомобиль StarLine — это открытая площадка для объединения лучших инженерных умов России и мира с целью создания прогрессивных технологий беспилотного вождения, которые сделают наше будущее безопасным и комфортным.
Для того, чтобы понять принципы работы CAN-шины мы решили написать/перевести ряд статей, посвященных этой тематике, как обычно, основываясь на материалах зарубежных источников.
Также можете прочитать вторую нашу переводную статью Введение в CAN.
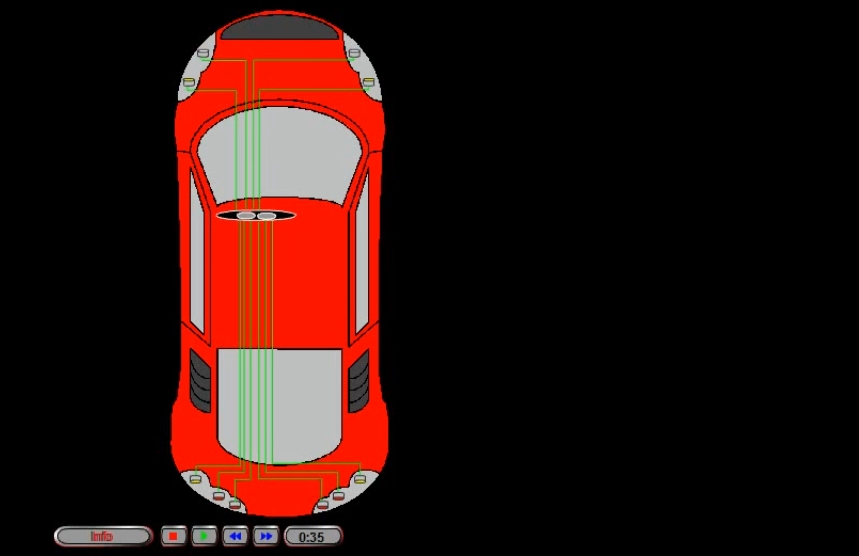
Мы начнем с основ построения сети CAN-шины. На схеме приведен автомобиль с его системой освещения.

Показана обычная проводка, в которой каждая лампа напрямую подключена с каким-либо переключателем или контактом педали тормоза.
Теперь аналогичная функциональность показана с применением технологии CAN-шины. Передние и задние световые приборы подключены к контролирующим модулям. Контролирующие модули соединены параллельно с такими же проводами шины.
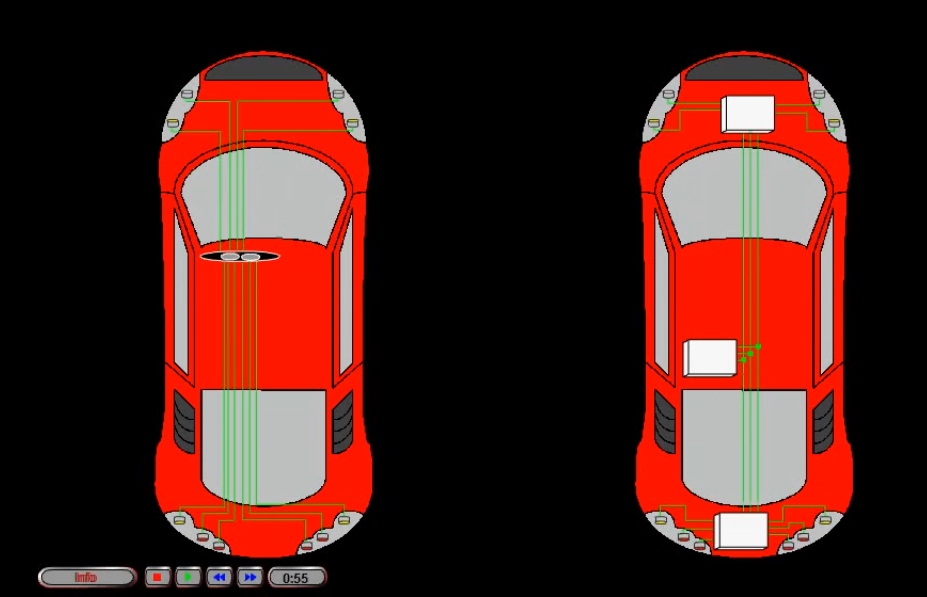
Этот небольшой пример демонстрирует, что объем электропроводки снижается. Вдобавок ко всему модули управления могут обнаруживать перегоревшие лампы и информировать об этом водителя.
Автомобиль на указанном виде содержит четыре модуля управления и четко отражает построение учебной системы (платы) CANBASIC
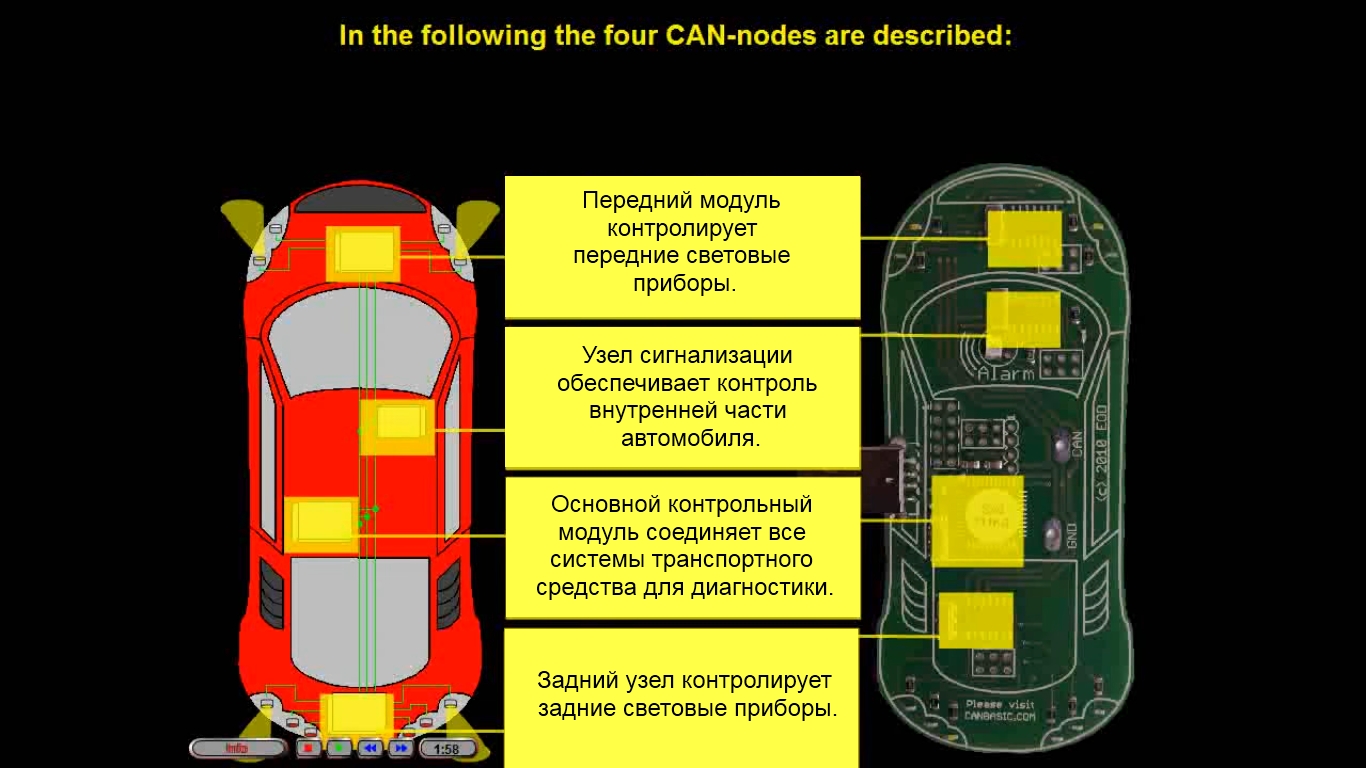
В вышеописанном указано четыре узла шины (CAN-узла).
Передний модуль контролирует передние световые приборы.
Узел сигнализации обеспечивает контроль внутренней части автомобиля.
Основной контрольный модуль соединяет все системы транспортного средства для диагностики.
Задний узел контролирует задние световые приборы.
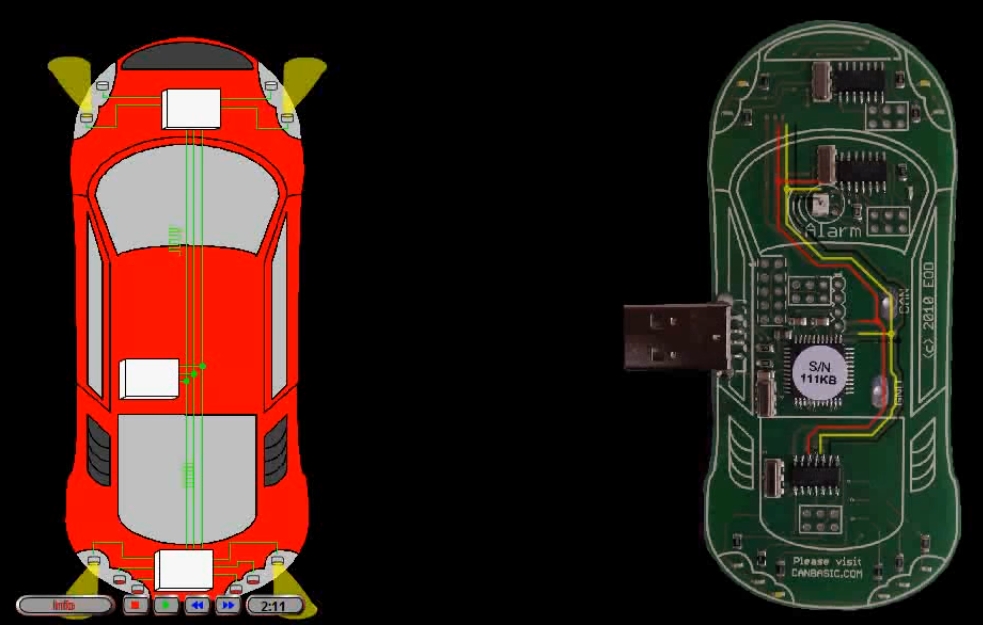
В большинстве транспортных средств для подключения главного модуля управления к ПК с помощью диагностического программного обеспечения вам нужен OBD-USB конвертер.
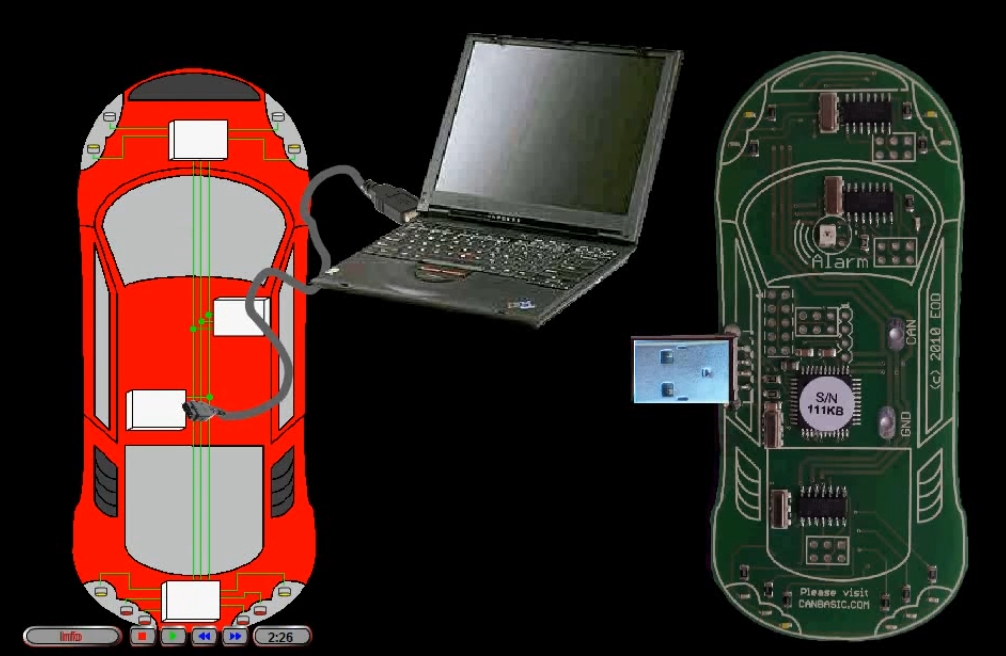
Плата CANBASIC уже содержит в себе OBD-USB конвертер и может быть напрямую подключена к ПК.
Питается плата от интерфейса USB, поэтому дополнительные кабели не нужны.

Провода шины используются для передачи множества данных. Как это работает ?
Как работает CAN-шина
Эти данные передаются последовательно. Вот пример.

Для того, чтобы сделать это они договорились, что получатель смотрит за состоянием лампы каждые 10 секунд.
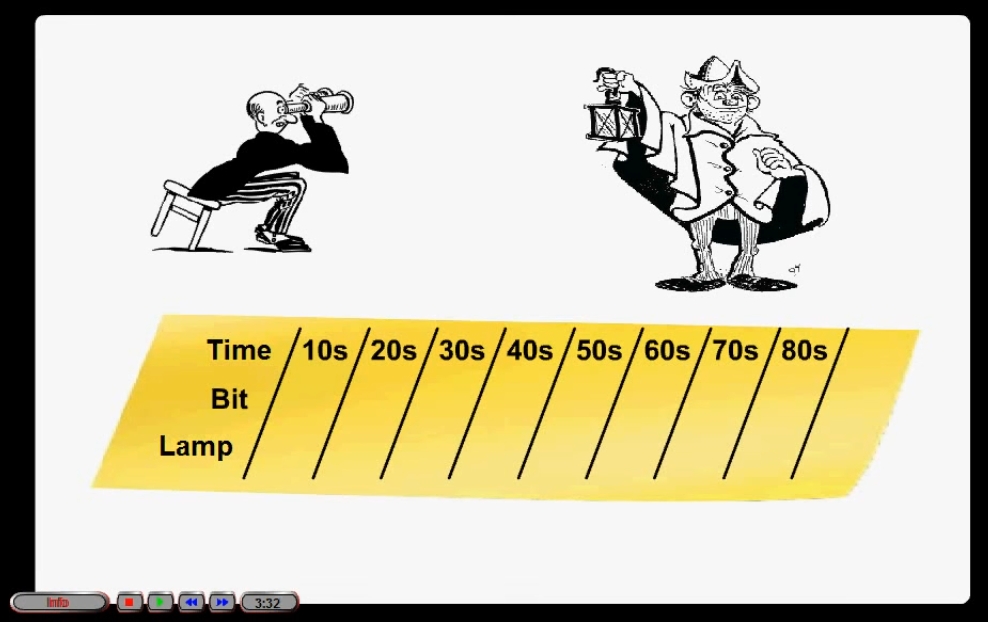
Это выглядит так:
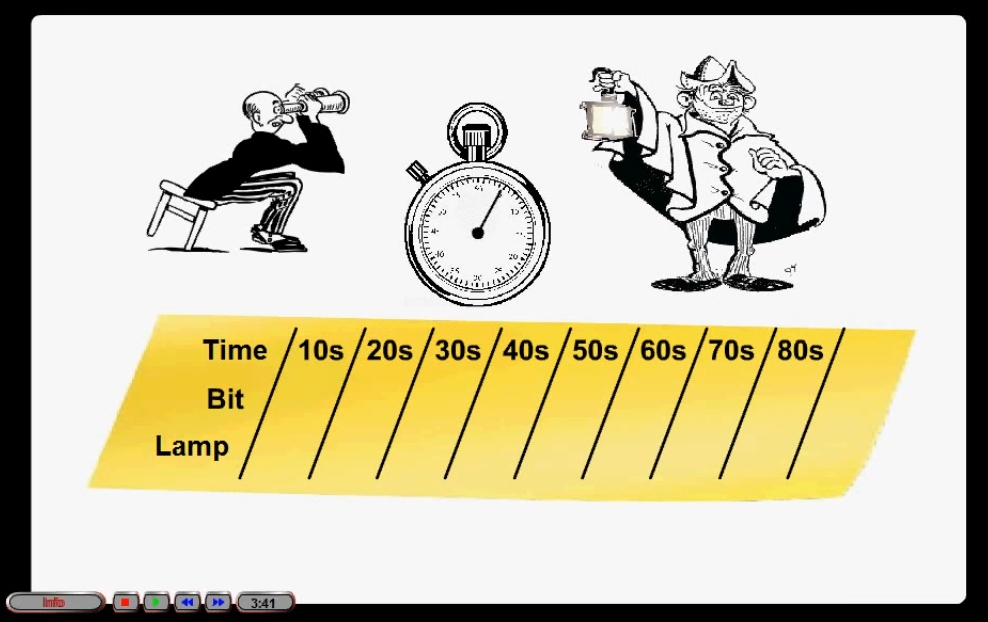


Спустя 80 секунд:
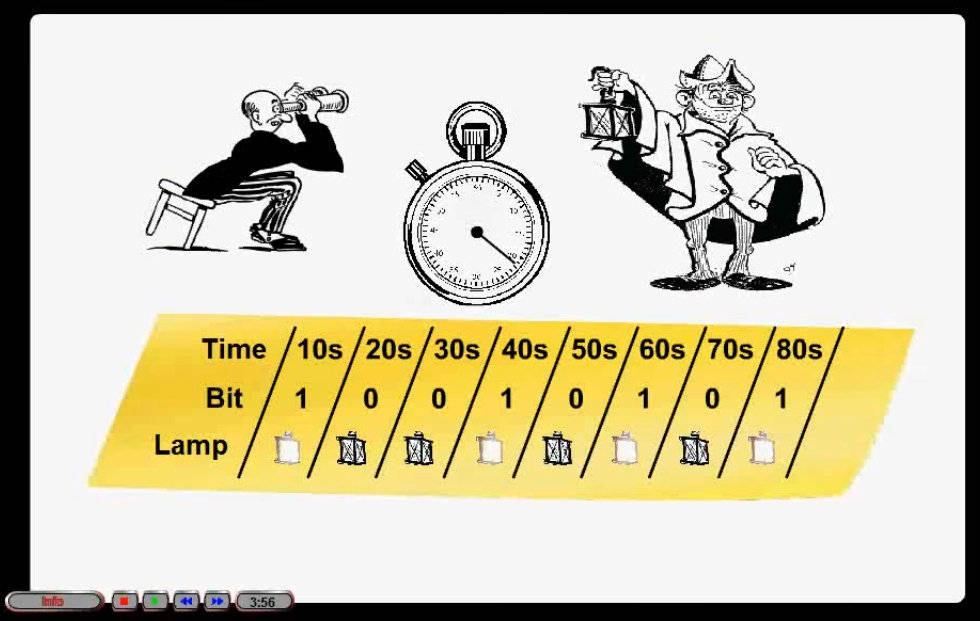
Теперь 8 бит данных были переданы со скоростью 0,1 бит в секунду (т.е. 1 бит в 10 секунд). Это называется последовательной передачей данных.
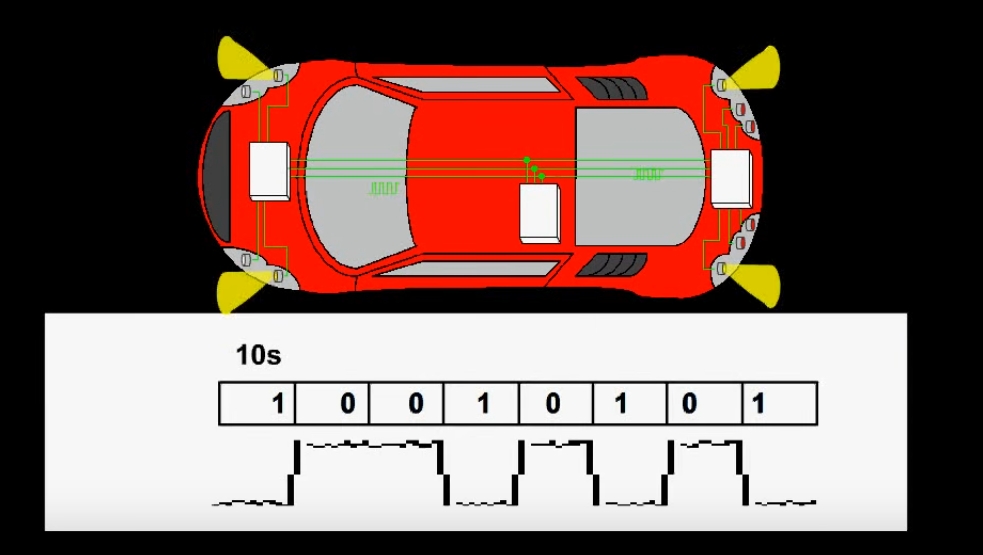
Для использования этого подхода в автомобильном приложении интервал времени сокращается с 10 секунд до 0,000006 секунды. Для передачи информации посредством изменения уровня напряжения на шине данных.

Для измерения электрических сигналов шины КАН используется осциллограф. Две измерительных площадки на плате CANBASIC позволяют измерить этот сигнал.
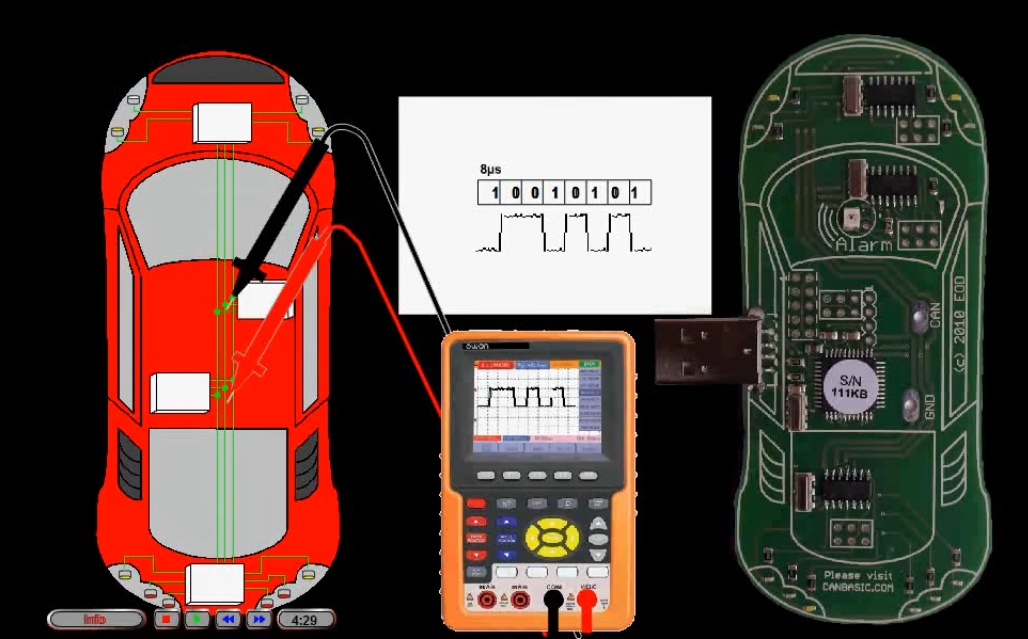
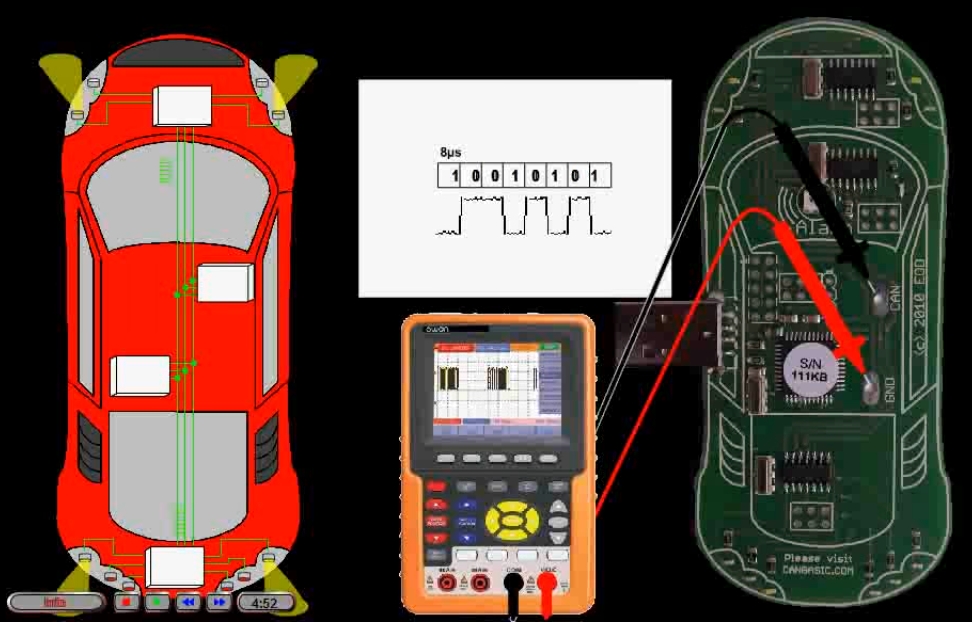
В результате одиночные CAN-биты больше не могут быть распознаны. Для решения этой проблемы CANBASIC-модуль оснащен цифровым запоминающим осциллографом.
Мы вставляем модуль CANBASIC в свободный разъем USB, после чего он будет автоматически обнаружен. Программное обеспечение CANBASIC можно запустить прямо сейчас.
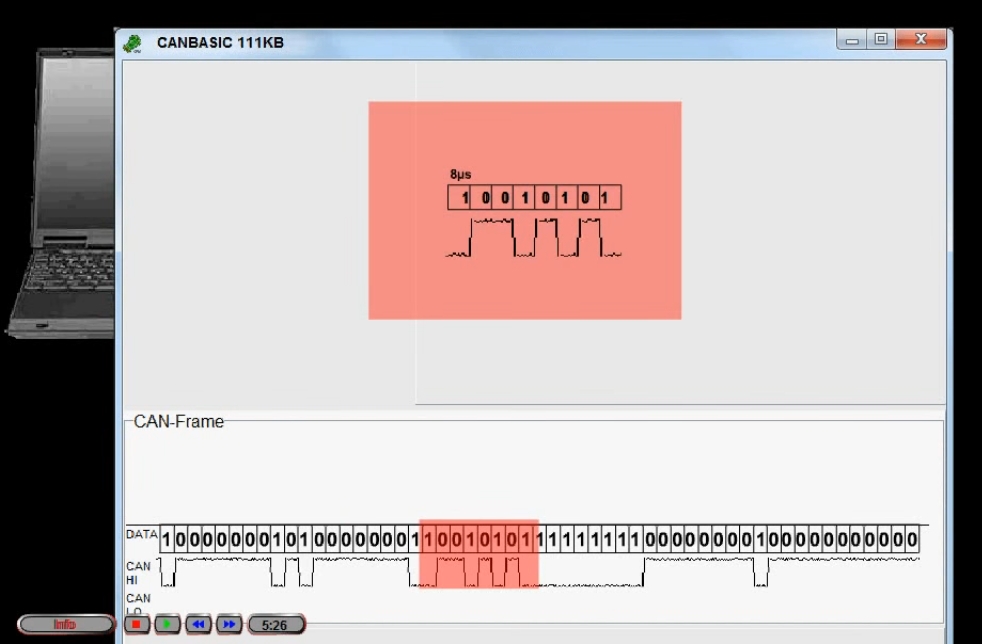
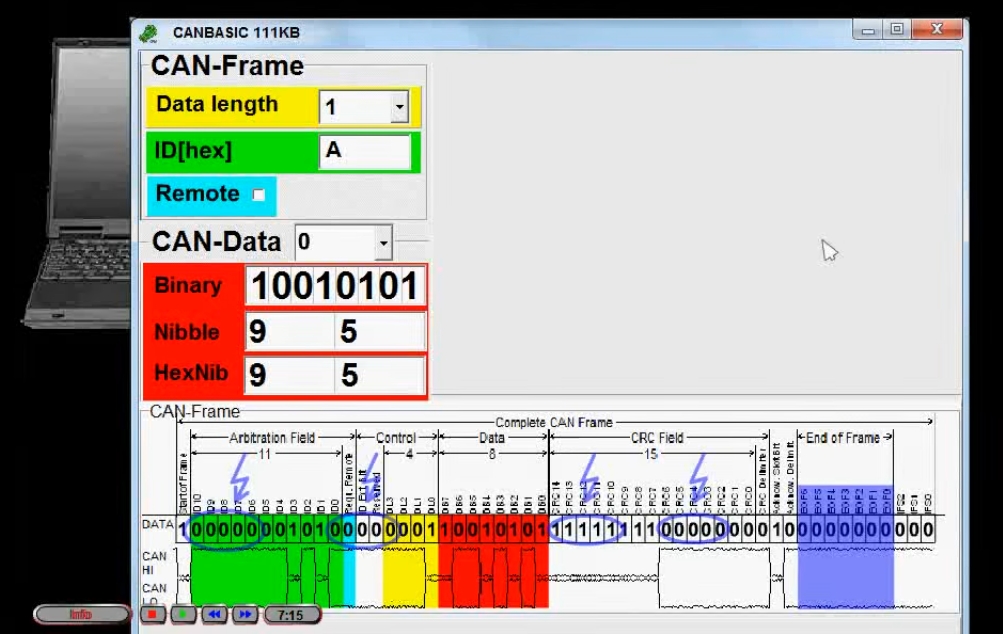
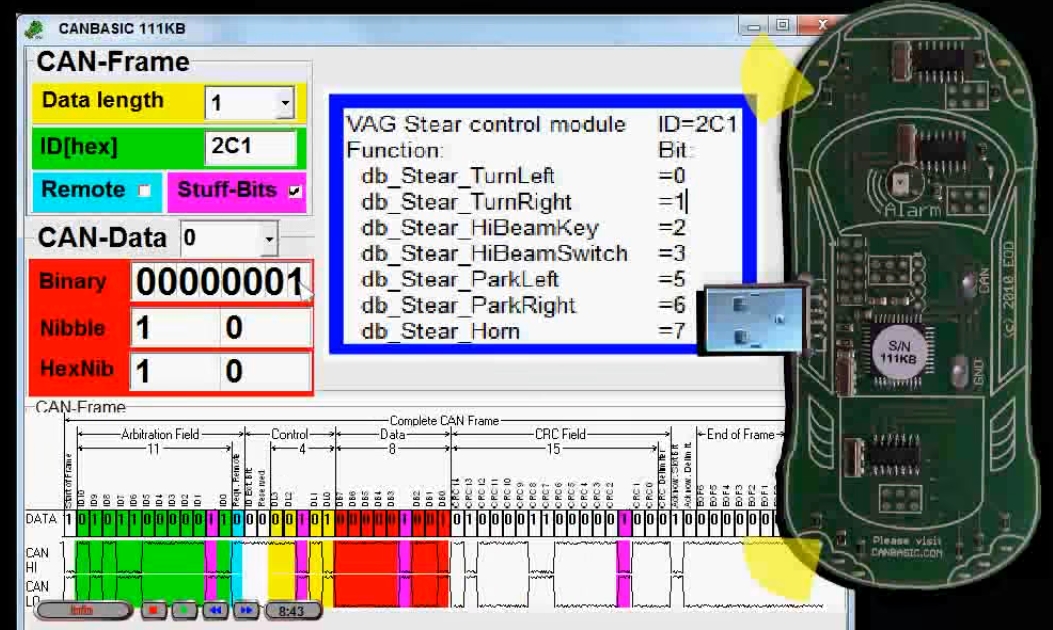
Вы можете видеть вид программного осциллографа с прикрепленными значениями битов. Красным показаны данные, переданные в предыдущем примере.
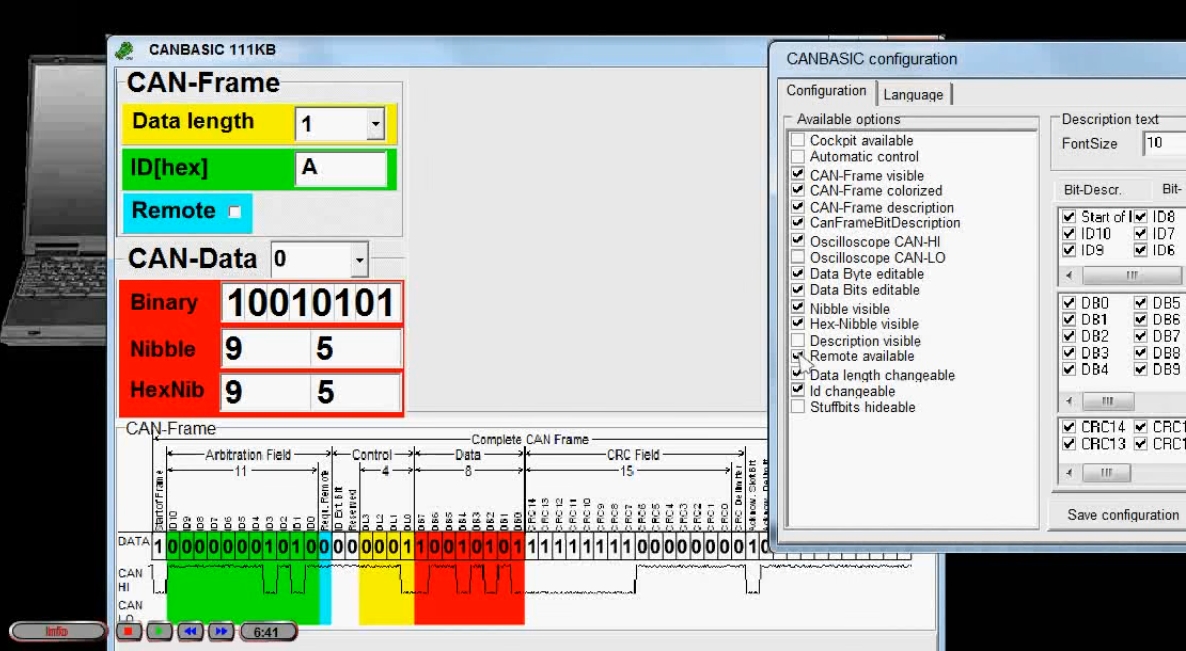
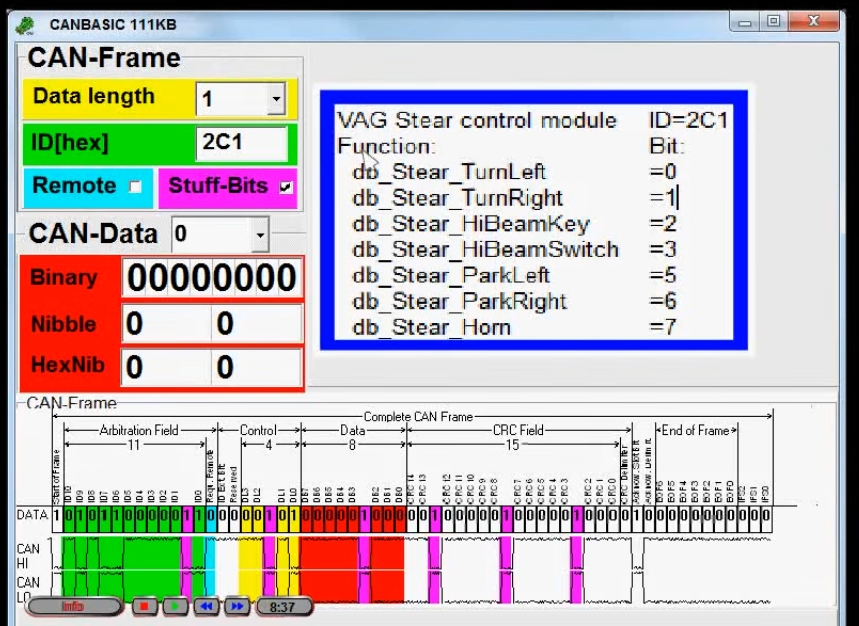
Желтая область определяет количество пользовательских данных. В зеленой зоне может быть установлен уникальный идентификатор.
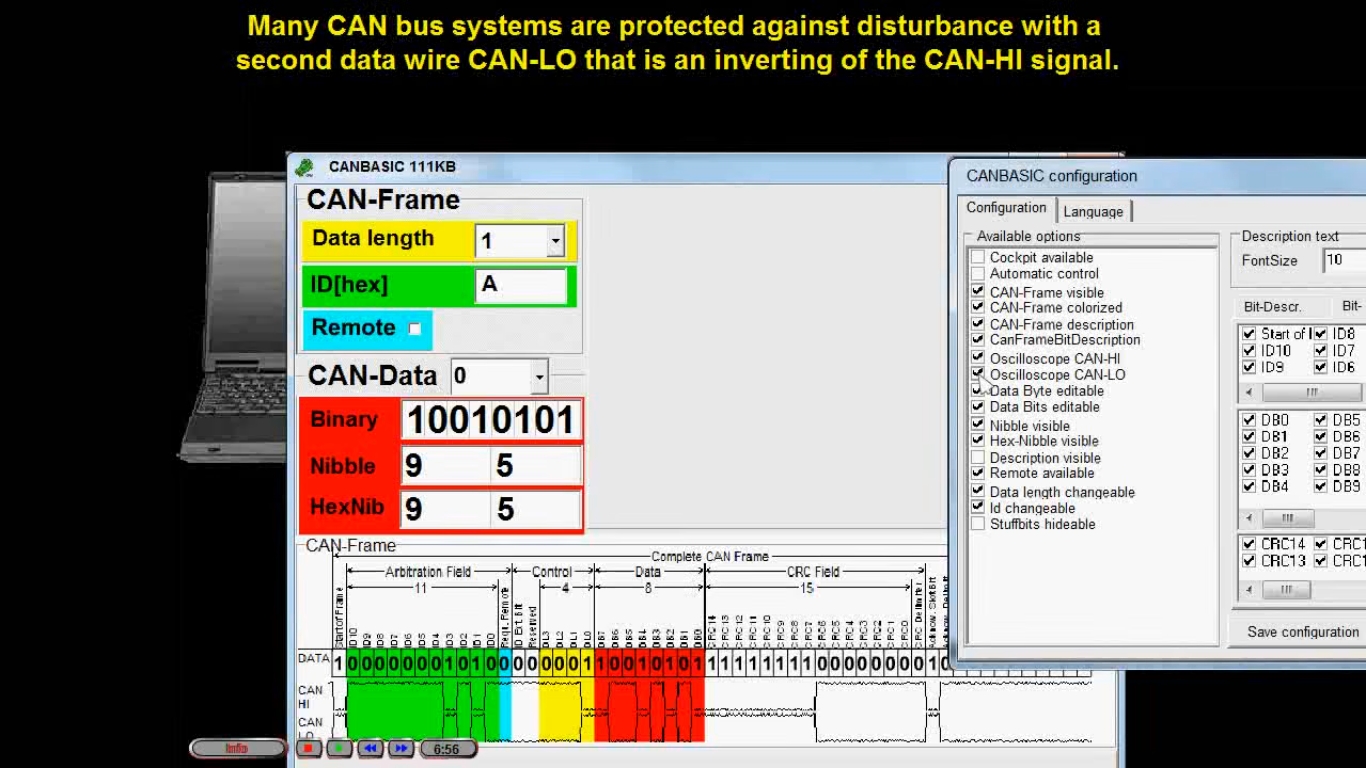
Многие системы с шиной CAN защищены от помех вторым каналом CAN-LO для передачи данных, который является инвертированным относительно сигнала CAN-HI (т.е. идет тот же сигнал, только с обратным знаком).
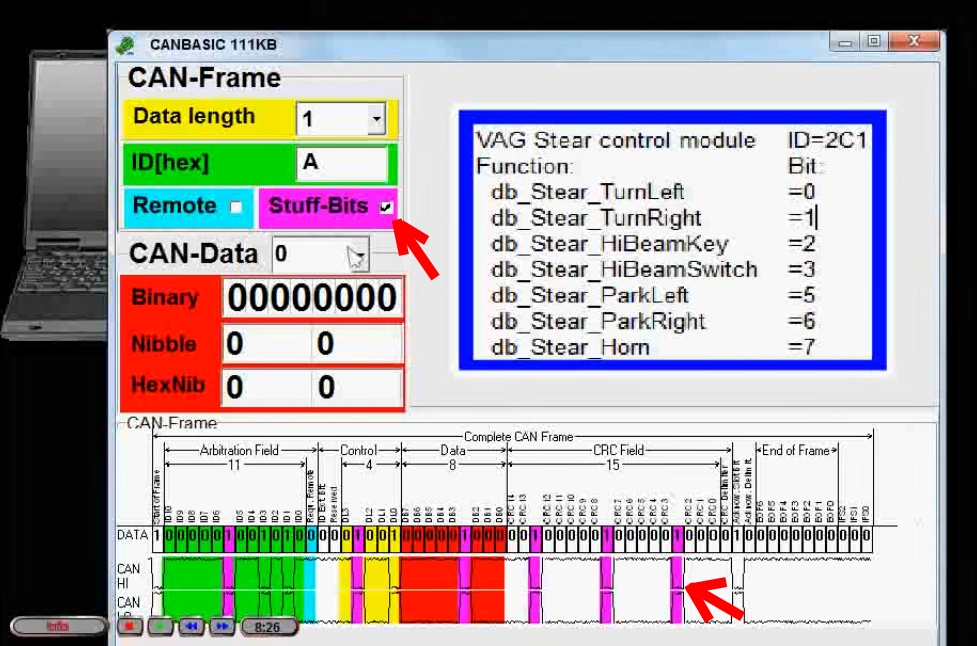
Шесть последовательных битов с одинаковым уровнем определяют конец CAN-кадра.
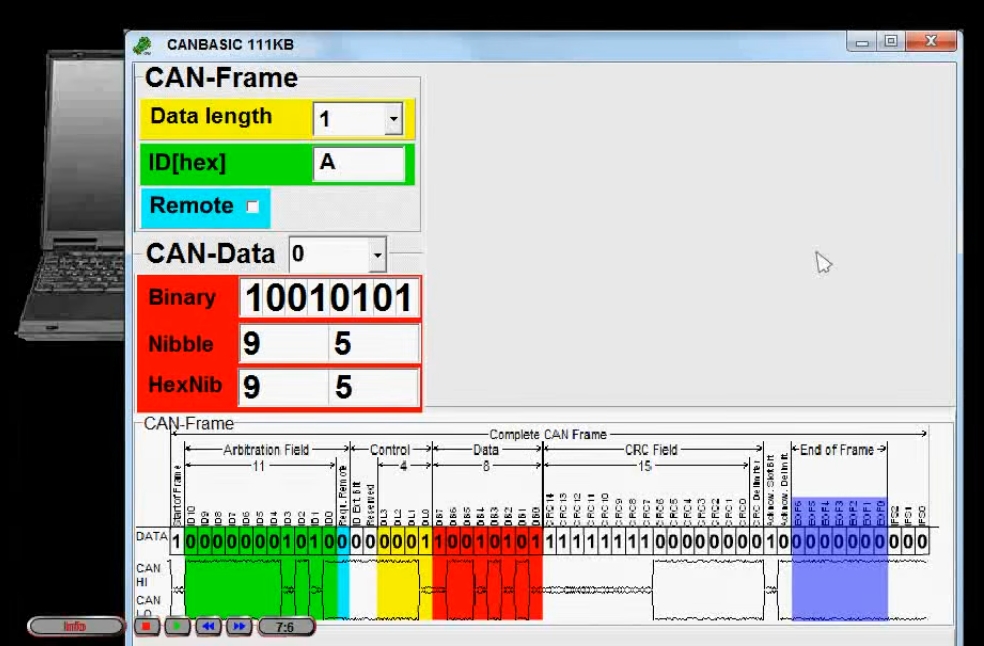
Так совпало, что другие части CAN-кадра могут содержать более пяти последовательных битов с одинаковым уровнем.
Чтобы избежать этой битовой метки, если появляется пять последовательных битов с одинаковым уровнем, в конце CAN-кадра вставляется противоположный бит. Эти биты называют стафф-битами (мусорными битами). CAN-приемники (получатели сигнала) игнорируют эти биты.
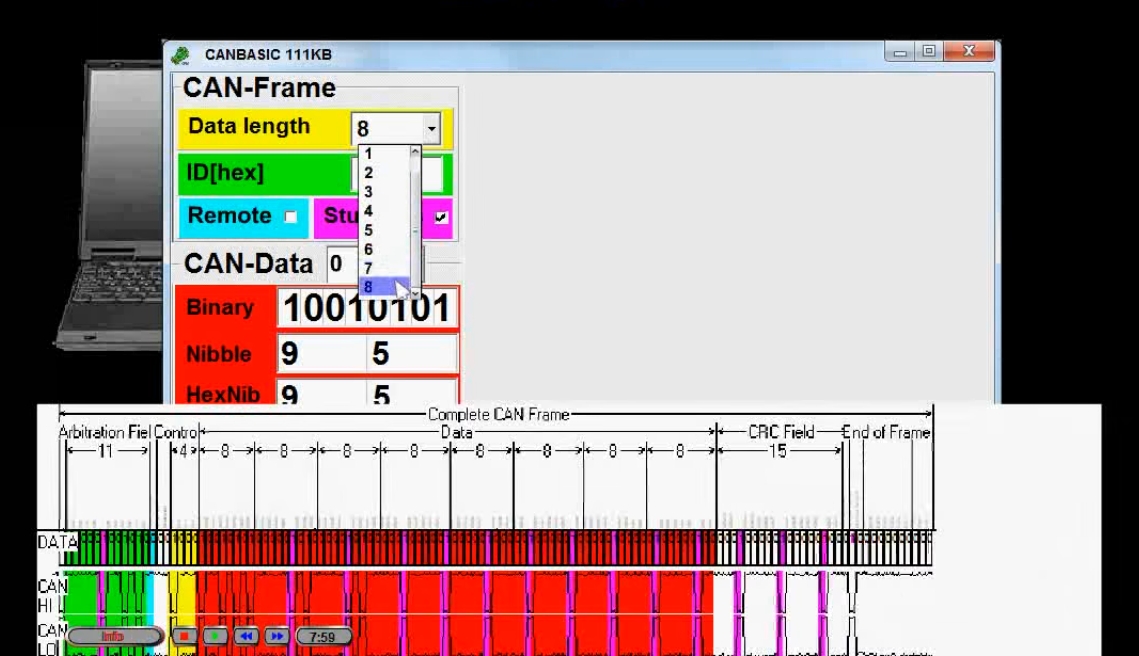
Вставленные данные немедленно обновляются в CAN-кадре, в данном примере длина данных будет изменена с одного байта на 8 байтов и сдвинута назад на один байт.
Лампы поворотников могут быть установлены на ближний свет для работы в качестве ДХО. Яркостью будет управлять широтно-импульсная модуляция (ШИМ), в соответствии с возможностями современной диодной техники.
Теперь мы можем активировать фары ближнего света, противотуманные фары, стоп-сигналы и фары дальнего.

С сигнальным узлом вы можете считывать сигнал датчика после инициирующего удаленного запроса.
В режиме удаленного запроса второй CAN-кадр будет принят и показан ниже отправленного CAN-кадра.
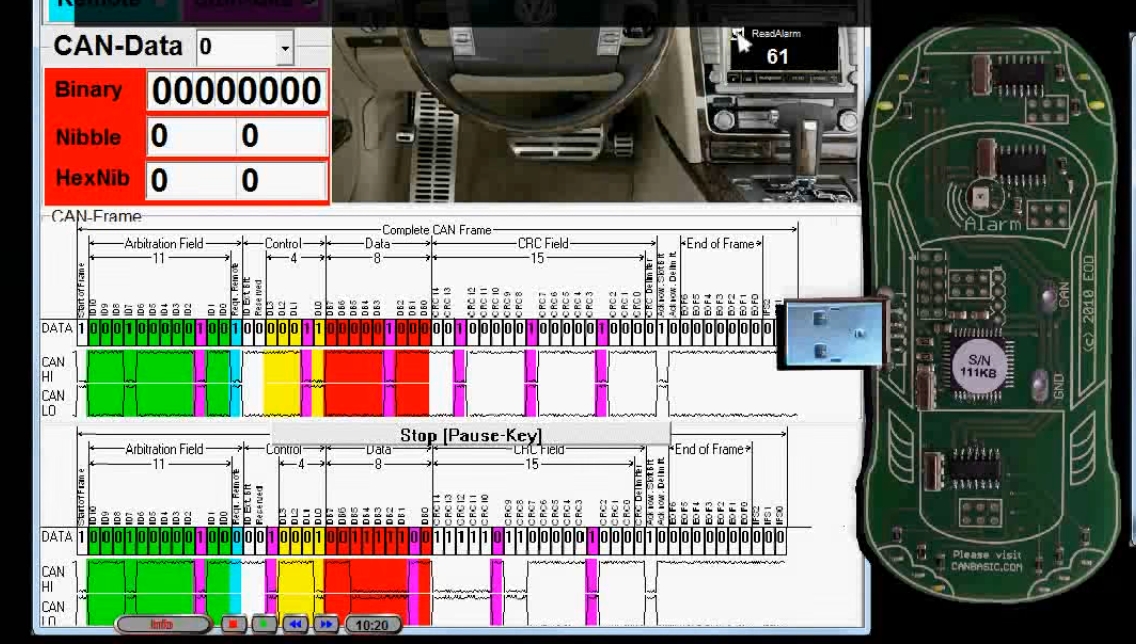
Байт данных CAN теперь содержит результат измерения датчика. С приближением к датчику пальца вы можете изменить измеренное значение.

Клавиша паузы замораживает текущий CAN-кадр и позволяет провести точный анализ.
Как уже было показано, различные части CAN-кадра могут быть скрыты.
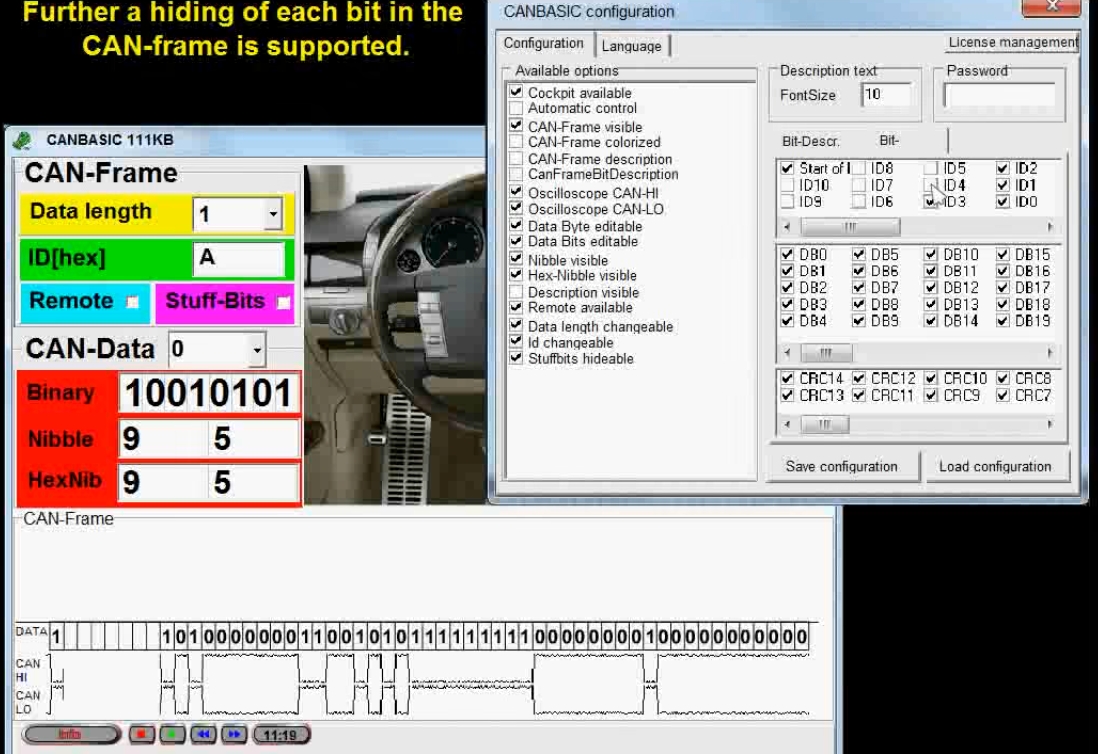
Кроме того поддерживается скрытие каждого бита в КАН-кадре.
Это очень полезно, если вы хотите использовать представление CAN-кадра в ваших собственных документах, например в листе упражнений.

Арбитраж
В шине CAN биты 0 и 1 имеют ещё одно название: рецессивный уровень и доминантный уровень, соответственно. Если двумя разными передатчиками будет одновремнно передан рецессивный и доминантный уровни, то доминантный уровень подавит рецессивный. Этим механизмом подавления обеспечивается арбитраж на шине. Каждый передатчик одновремнено считывает то, что он предаёт в шину. Передатчик с более низким приоритетом вынужден отпустить шину, так как чужой доминантный уровень с более высоким приоритетом исказил его предачу. В то же время, пакет с более высоким уровнем остался неизменным. Передатчик, потерявший арбитраж, может повторить попытку через некоторе время.
Физический уровень
В автомобиле может применяться несколько типов шин CAN.
Высокоскоростной CAN (High speed) применяется в основном в сети управления двигателем и управления шасси. Там, где необходима высокая скорость реакции. Скорость обмена по этой шине 500 или 250 кбит/сек.
Схема подключения ЭБУ к высокоскоростной шине CAN
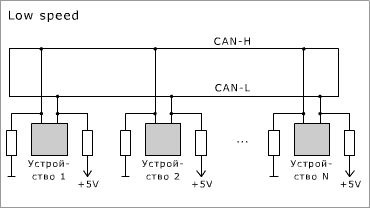
Низкоскоростной CAN (Low speed) применяется в сети управления кузова. Скорость обмена по этой шине, как правило, равняется 125 кбит/сек.
Схема подключения ЭБУ к низкоскоростной шине CAN
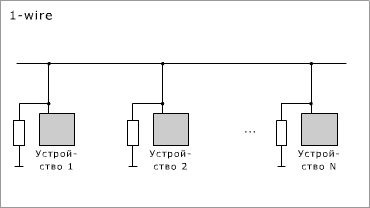
Однопроводный CAN (1-wire) Это удешевлённый варинат Low speed CAN, применяется в основном концерном GM. Используется для коммуникации между ЭБУ кузова машины. Работает на скорости 33,3 кбит/сек.
Схема подключения ЭБУ к однопроводной шине CAN
Надёжность
Двухпроводная шина сохраняет свою работоспособность при обрыве или замыкании одного из проводов (для двухпроводной шины).
Фазы работы
Шина CAN используется в автомобилях достаточно давно. Изначально шина CAN использовалась в простых конфигурациях. Например, для надёжной и быстрой связи между ЭБУ мотора и ЭБУ автоматической коробки передач. В этой конфигурации шина использовалась только для передачи данных. В ЭБУ заводилась линия питания и линия от замка зажигания, диагностика производилась по отдельным К-линиям, идущим из каждого ЭБУ.
В более современных автомобилях, по шине CAN передаётся не только управляющая, но и диагностическая информация. Помимо этого, шина CAN стала управлять системой питания ЭБУ. В этой конфигурации все ЭБУ подключены к общему питанию и шине CAN. Замок зажигания является электронным блоком управления и информация о включении зажигания передаётся от него по CAN шине.
Можно выделить четыре основные фазы работы шины:
Спящий режим
В этом режиме все ЭБУ, кроме ЭБУ замка, находятся в выключенном состоянии. На драйвер CAN подается питание. Драйвер так же находится в спящем состоянии. При этом, его энергопотребление составляет около 0,3 мА.
Пробуждение
Когда вставляется ключ зажигания или открывается дверь, замок выдаёт доминантное состояние в шину CAN. Это приводит к пробуждению CAN драйверов в спящих ЭБУ. Драйверы при обнаружении активности на шине включают стабилизаторы питания в своих ЭБУ.
Активный режим
В активном режиме ЭБУ постоянно обмениваются информацией. Энергопотребление каждого предатчика при доминантных уровнях может достигать 80 мА.
Засыпание
В момент выключения зажигания, по шине CAN выдаётся команда на выключение, после чего каждый ЭБУ сам себя обесточивает и преходит в спящий режим.
Примечание:
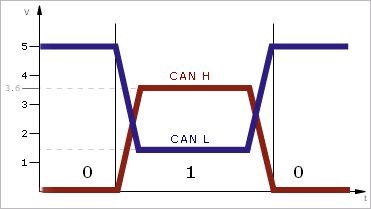
Для однопроводной шины CAN сигнал пробуждения имеет уровень 12 В, обычный обмен 0-4 В.
Немного отступлю от первоисточника.
Самый главный плюс, это очень высокая помехозащищённость сигнала. В чём прикол? Одновременно идут два дублирующих сигнала, только один высокий, второй низкий. Ловят они помеху. Помеха воздействует одинаково на оба сигнала. А на выходе у нас одинаковый уровень. Два уровня сигнала компенсируют помеху. Наглядно это выглядит вот так:
Автомобили давно уже стали не просто компьютерами на колёсах, а скорее компьютерными сетями. Передача механических, гидравлических или пневматических усилий между узлами и механизмами со временем превратилась в обмен электрическими сигналами, а сейчас и в информационное взаимодействие.

Наряду с массовым внедрением дешёвых электронных комплектующих, потребовалось разработать достаточно сложное и надёжное сетевое физическое и программное обеспечение.
Зачем нужна в машине CAN-шина
По мере усложнения автомобильной электроники, производители столкнулись с некоторыми проблемами, которые всё больше проявлялись с ростом рыночной конкурентоспособности новых моделей.
Далее наращивать объём оборудования простым добавлением управляющих и исполнительных устройств стало невозможно:
- количество проводов в жгутах, их масса, объёмы и расход дорогостоящей меди стали превышать разумные пределы;
- многие узлы, особенно датчики и первичные преобразователи, многократно дублировались, что необоснованно увеличивало затраты;
- сложнейшие автомобили, особенно премиального класса, стали совершенно неподъёмными в обслуживании и диагностике даже для профильных сервисов из-за отсутствия стандартизации технических решений;
- надёжность машин падала по мере роста количества заключённого в них оборудования, как по чисто объективным законам связи сложности и безотказности, так и из-за отсутствия времени на отработку многочисленных уникальных систем.
Решение должно было быть радикальным, и этот качественный скачок в развитии автомобильной электроники произошёл.
Электросхемы машин стали делать по принципам, заложенным в основах вычислительной техники и к тому времени уже достаточно устоявшимся и понятным.
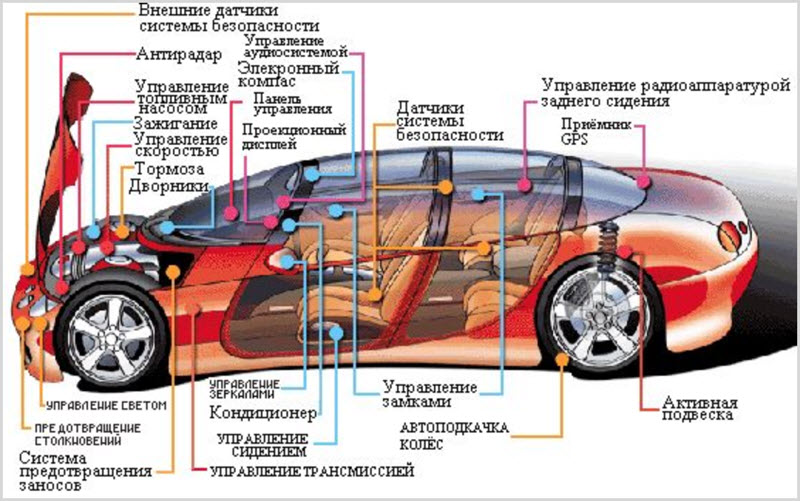
Автомобиль стал представлять собой сеть из микрокомпьютеров, каждый из которых обслуживал свою систему или отдельный узел.
Например, двигатель, коробку передач, узлы трансмиссии, блок климата и даже отдельные фонари наружного освещения или стеклоподъёмники. Уже не надо было тянуть к каждому устройству медные провода в огромном количестве через весь автомобиль.
Причём до появления единой информационной шины некоторые узлы были обвешаны сразу несколькими однотипными датчиками, электронными блоками и жгутами проводки.
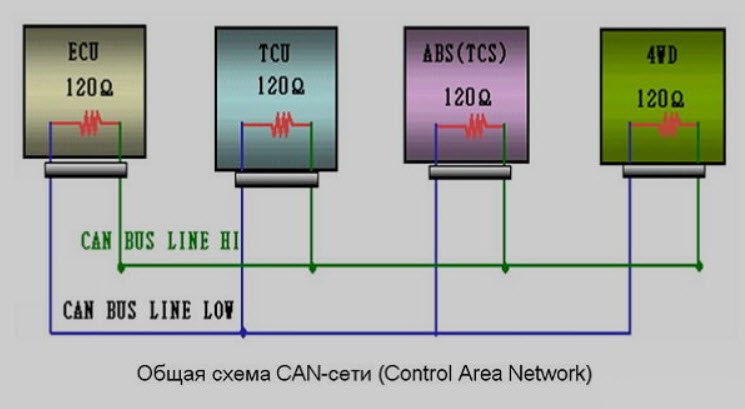
CAN-шина обходится единственной витой парой, то есть скрученными между собой двумя тонкими проводками, которые обходят все устройства, имея ответвления на каждое из них.
По схеме получается, что все блоки соединены параллельно через данную шину. Последовательный способ передачи информации делает это возможным, отдельных проводов данных, адресов, синхронизации и назначения приоритета не требуется.
Более того, системе не нужен единый обрабатывающий и управляющий сервер, все ресурсы распределены по микроконтроллерам.
Схема и место расположения КАН-интерфейса
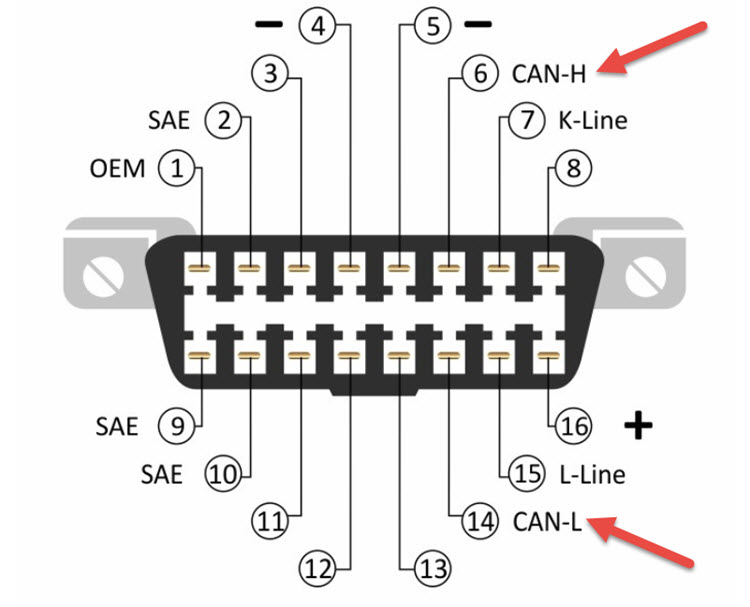
Сеть имеет выход наружу через диагностический OBD разъём, где на этот счёт стандартом чётко определена пара контактов.

Точнее, две пары, из дальнейшего рассмотрения станет понятно, что через диагностику можно подключаться к двум CAN-шинам различного вида и назначения.
Обеспечивающий совместную работу шлюз в разных автомобилях может быть выполнен в виде отдельного блока, входить в состав контроллера управления двигателем, но чаще – приборной панели.
Принцип работы
Работа CAN-шины определяется физическим и логическим протоколами, которые достаточно чётко стандартизованы, хотя и имеют целый ряд исполнений.
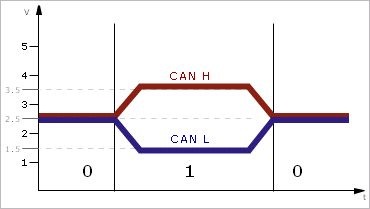
Физически это витая пара, каждый из проводов которой является сигнальным. Работают они в противофазе, один поэтому называется CAN-High, второй – CAN-Low.
Сделано так с целью обеспечить максимальную помехоустойчивость при большой скорости передачи данных. Сигнал с пары снимается по дифференциальному принципу, то есть парой встречно включённых компараторов.
На концах витой пары имеется волновое согласование двумя терминальными резисторами по 120 Ом. Хотя встречаются и другие номиналы, но редко.
Активным уровнем считается низкий, он же логический ноль. Это общий принцип в работе устройств с открытым коллектором, разве что тут не применяется инвертирование уровней. Отсюда и логический принцип работы – инициируется линия любым устройством, открывшим свой выходной транзистор и сформировавшим первый нулевой бит.
Далее идёт идентификация приоритетного устройства, которое должно передать свою информацию первым в случае конфликта во времени. Протокол стандартный, каждый бит посылки расписан в даташитах ISO.
Все устройства одновременно передают и считывают информацию чётко соблюдая протокол, зашитый в памяти их контроллеров. Ненужные или ошибочные данные определяются и игнорируются.
Виды CAN-шин
Обычно используют две шины – высокоскоростную и низкоскоростную (не желая использовать этот компрометирующий термин, некоторые производители говорят о среднескоростных устройствах).
Первая применена для связи наиболее важных устройств, агрегатов двигателя, трансмиссии, тормозов, подвесок, систем безопасности. Вторая обслуживает второстепенные функции комфорта и сервиса.
Это не значит, что системы автономны. Они связаны между собой через шлюз, обычно находящийся в приборной панели. Низкоскоростная линия также имеет свои контакты в диагностическом разъёме, записанные в стандарт.
Сделано так, чтобы системы низшего уровня важности не мешали максимально быстрому обмену приоритетных устройств. А большое быстродействие, например, регулировке сидений ни к чему.
На низшем уровне могут работать ещё более простые шины, однопроводные и низкоскоростные. Они подключаются к общей CAN через свой контроллер.
Например, в двери могут стоять стеклоподъёмники, блок кнопок управления, различные датчики, всё это нет необходимости выводить на общую шину. Но и плодить множество проводов тоже. Используются простейшие контроллеры и однопроводная сеть.
Как подключиться и сделать диагностику автомобиля
Сканеры могут внедряться в протокол шины и анализировать её состояние, а также проходящую информацию. Можно использовать виртуальные устройства, эмулирующие отдельные блоки, а также создавать и передавать тестовые команды отдельным участникам сети.
Для связи используются специальные адаптеры USB-CAN, более сложные устройства и программное обеспечение.
До появления профессиональных CAN-анализаторов и тестеров пользовались скоростным запоминающим осциллографом и логическим анализатором.
Эти приборы тоже способны сохранять и предоставлять для изучения отдельные фреймы CAN, но в работе неудобны, требуют больших затрат времени.
Неисправности
Отказы шины обычно сводятся к нескольким типовым случаям:
- пропадание питания отдельных устройств;
- повреждения проводки и разъёмов;
- отказ контроллеров.
Базой всей сетевой периферии является современная микроэлектроника и большие интегральные контроллеры серийного производства, поэтому надёжность оборудования в целом достаточно высока. Но поиски проблемного блока иногда бывают долгими из-за параллельного их подключения и размещения по всему автомобилю.
Плюсы и минусы встроенных шин
Сейчас уже трудно представить себе автомобиль с достойным набором современных опций без информационной шины, а конкурентоспособность требует ещё и высокого быстродействия.
CAN-шина всё это обеспечивает:
- имеется автоматический контроль проходящей информации на ошибки;
- дифференциальная передача сигналов и использование витой пары даёт хорошую скорость и защиту от помех;
- стандартизация протоколов упрощает диагностику и поиск неисправностей;
- построение системы приоритетов упрощает проектирование;
- все устройства функционально закончены и универсальны.
Но со временем усугубляются и недостатки. Так, усложнение автомобилей привело к тому, что быстродействия даже самых последних версий уже не хватает.
Поэтому в настоящее время эту самую распространённую автомобильную шину уже можно считать устаревшей, новые проекты обладают значительно более высоким быстродействием.

Почему CANNY? От названия шины CAN, которая широко используется на транспорте и, в частности, во всех современных автомобилях в качестве бортовой сети. Итак, что же можно сделать, имея специализированный контроллер, подключённый к CAN шине вашего автомобиля?
Шина CAN
Образно говоря, шина CAN это нервная система вашего автомобиля. По ней передаётся вся информация о состоянии блоков и систем, а также управляющие команды, которые во многом определяют поведение автомобиля. Зажигание фар, открывание и закрывание дверей, управление проигрыванием музыки в салоне машины, срабатывание сигнализации и т. д. — всё это работает и управляется по этой шине.
Физически, шина CAN представляет собой два перевитых провода и очень проста в монтаже и подключении. Несмотря на свою простоту, она, благодаря своей дифференциальной природе, хорошо защищена от различных наводок и помех. Высокая надежность и большая допустимая длина сети, до 1000 метров, помогла CAN завоевать широкую популярность у производителей различного, не только автомобильного оборудования.
Контроллеры CANNY

Флагманом линейки является контроллер CANNY 7, наиболее мощный и имеющий максимум возможностей. Большое количество памяти, мощные выходы, позволяющие напрямую управлять реле автомобиля, интеллектуальная система защиты от коротких замыканий, защита от бросков тока и напряжения в бортовой сети автомобиля — всё это делает этот контроллер отличным решением для воплощения любых ваших идей и проектов.

Кроме CANNY 7 в линейке контроллеров присутствует ещё несколько моделей, мы будем проводить свои эксперименты с более простой встраиваемой моделью CANNY 5 Nano. Она также поддерживает работу с CAN шиной, но при этом похожа на уже знакомую нам Arduino Nano.
Визуальное программирование

Ни одной строчки кода!
CannyLab является бесплатной средой разработки и вы можете свободно скачать её с сайта разработчиков, она также не требует специальной процедуры инсталляции — достаточно распаковать файл с архивом — и вы можете начинать работу.
Подключение
Подключение CANNY 5 Nano к компьютеру мало чем отличается от подключения контроллеров Arduino. При наличии в системе драйвера Silicon Labs CP210x, либо после его установки из скаченного дистрибутива CannyLab, Windows создаёт виртуальный COM порт и CANNY готов к работе. В моём случае понадобилось ещё перезагрузить компьютер, но возможно это особенность моей системы.
Практические примеры
Давайте на простых примерах разберём, как в CannyLab выполнять действия, привычные нам в Arduino IDE. Начнём с традиционного мигания светодиодом.
В контроллере CANNY 5 на выводе С4 (Channel 4) присутствует тестовый светодиод (аналог светодиода, находящегося на 13 выводе в Arduino). И его тоже можно использовать для индикации и экспериментов, чем мы и воспользуемся.
Что же нужно, чтобы помигать светодиодом в контроллере CANNY? Нужно сделать всего две вещи — сконфигурировать пин четвертого канала как выход и подать на этот выход сигнал с ШИМ генератора. Все эти действия мы уже не раз проделывали в Arduino IDE, посмотрим как это выглядит в CannyLab.
Итак, конфигурируем пин четвертого канала как выход


Режим симуляции

Среда разработки CannyLab позволяет запускать и отлаживать программу, не записывая её в память контроллера. В режиме симуляции вы можете видеть результат работы программы прямо в реальном времени и даже вмешиваться в её работу.
Заливка в контроллер
Далее нужно отключить контроллер от USB порта компьютера, снять перемычку на плате и можно включать запрограммированный контроллер, который после включения будет работать по вашей программе.
Аналоговые входы
Для того, чтобы лучше понять принцип программирования контроллеров CANNY в среде разработке CannyLab, давайте ещё разберём пример работы с аналоговым входом в этой системе.
Мы будем отслеживать уровень напряжения на 10 пине контроллера и если он находится в диапазоне 2,5 В ± 20%, будем зажигать встроенный в плату светодиод.
Как и в предыдущем примере, конфигурируем 4-й пин как выход для того, чтобы иметь возможность управлять работой светодиода.

Включаем АЦП на 10-м канале.

Далее пользуемся двумя логическими блоками, которые выдают 1 на выход, если напряжение находится в заданном диапазоне. Полный диапазон от 0 до 4095.

Вот и всё. То, что мы привычно делали на Arduino, мы легко сделали в CannyLab. Осталось только освоиться в этой среде программирования и вы сможете легко и непринуждённо создавать свои проекты на этой платформе.
Эти простые примеры составления программ даны для того, чтобы вы могли понять принцип визуального программирования микроконтроллеров CANNY. В дальнейшей работе вам поможет отличная справочная документация и поддержка разработчиков на сайте и форуме системы.
Заключение по вводной статье цикла
Подключив контроллер CANNY к своему автомобилю вы сможете реализовать множество интересных и уникальных идей, например, нестандартную сигнализацию, которую не так то легко будет вскрыть (в силу её нестандартности) или добавите новые функции, о которых мечтали, но не надеялись, что это возможно реализовать на практике.
Если вам нравится визуальное программирование в стиле CannyLab, то контроллеры CANNY могут стать для вас интересной альтернативой Arduino или работать в связке с контроллерами Arduino. Об этом мы поговорим во второй статье цикла, в которой я расскажу вам об интеграции контроллеров CANNY с системой Arduino Mega Server.
Напомню, что AMS теперь работает не только на платах Arduino, но и на беспроводных Wi-Fi модулях ESP8266 и именно о такой связке пойдёт речь в следующий раз.
Читайте также: