
Когда машина едет без водителя
Добавил пользователь Алексей Ф. Обновлено: 19.09.2024
Сейчас около 60 компаний занимаются разработкой и выпуском на рынок автомобилей с автопилотом. Кто из них добился наибольшего успеха в 2020 году? Для начала разберемся, что такое автомобиль с автопилотом вообще.
Поскольку эти уровни не имеют большого значения для людей, не относящихся к отрасли, производители автомобилей часто не говорят о своих технологиях в этих конкретных условиях SAE. Наиболее интересны для людей либо автомобили, которые большую часть пути по шоссе находятся в режиме самоуправления (уровень 3), либо автомобили, которые могут ездить почти самостоятельно, за исключением нескольких условий (уровень 4).
Итак, какие компании отличились разработками в области беспилотных автомобилей и как в 2020 году?
Cruise — тестирует полностью беспилотные автомобили в Сан-Франциско
Cruise, компания по производству беспилотных автомобилей, аффилированная с General Motors и Honda, тестирует в Сан-Франциско автомобили без водителя, за рулем которого не должен сидеть человек. Компания одной из первых протестировала свои беспилотные автомобили 4-ого уровня в плотной и сложной городской среде.
На видео, опубликованном компанией, сотрудник Cruise сидит на пассажирском сиденье, пока машина едет по темным улицам Сан-Франциско. Все автомобили Cruise имеют аварийный выключатель в центральном канале рядом с переключателем передач на случай, если что-то пойдет не так.
Cruise стала пятой компанией, получившей разрешение на использование автопилота без водителя от Департамента автотранспортных средств штата. Другие компании — Waymo, Nuro, Zoox и AutoX.
Это первый раз, когда Cruise продемонстрировала свои возможности автомобиля уровня 4. Его главный конкурент, дочерняя компания Google Waymo, уже более года тестирует свои полностью беспилотные автомобили в Фениксе и недавно объявила, что сделает свою службу такси уровня 4 доступной для большего числа клиентов.
В прошлом году Cruise представила Cruise Origin, полностью беспилотный прототип автомобиля без рулевого колеса, педалей и каких-либо элементов управления, обычно связанных с вождением человека. Автомобиль, который будет запущен в производство на заводе GM в Детройте-Хамтрамке, построен для совместного использования несколькими пассажирами. Хотя насколько востребован общий транспорт в мире после COVID-19, неизвестно. Cruise недавно представила новый набор протоколов безопасности, направленных на то, чтобы люди оставались социально дистанцированными во время поездок, а транспортное средство дезинфицировалось между поездками.
Google Waymo — открывает доступ к своим беспилотным автомобилям
Waymo, самоуправляемое подразделение Alphabet, объявило, что откроет свои полностью беспилотные автомобили для всех клиентов службы вызова пассажиров в Фениксе, штат Аризона. Раньше к беспилотникам допускалось только несколько человек. Теперь более тысячи пользователей сервиса смогут ездить на автомобиле Waymo без водителя на переднем сиденье.
Waymo тестирует свои автомобили в районе Феникса с начала 2017 года. Беспилотные автомобили компании работают на территории площадью около 260 квадратных км. В конце 2018 года компания запустила ограниченную общедоступную службу вызова пассажиров под названием Waymo One, но единственными клиентами, которые получили доступ, были люди, которые сначала прошли проверку в рамках программы бета-тестирования ранних моделей Waymo. Компания сообщила, что у нее около 1500 активных пользователей в месяц из обеих программ.
Ранее только участникам программы Waymo было разрешено ездить в беспилотных автомобилях компании. Им надо было подписывать с компанией соглашение о неразглашении, чтобы получить доступ к ранним версиям технологии Waymo. Это запрещает им выступать публично, когда, скажем, одна из их поездок отклоняется от курса.
Для начала компания планирует предлагать поездки без водителя только для клиентов Waymo One — хотя эти люди могут брать с собой в поездку друзей и семью, заявил в своем блоге генеральный директор Waymo Джон Крафчик. В течение следующих нескольких недель еще больше людей будет приглашено подписаться на Waymo One. У компании есть список ожидания, из которого она выбирает участников.
Отметим, что эти беспилотные автомобили не совсем бесконтрольные. У Waymo есть команда удаленных сотрудников, которые в реальном времени следят с восьми камер за трансляциями каждого автомобиля и могут помочь одним нажатием кнопки, если программа попадает в трудное место и требует человеческого вмешательства, чтобы понять, что происходит. Но Waymo настаивает на том, что, все же, автопилот будет принимать большинство решений о вождении благодаря своей объемной компьютерной системе и программному обеспечению с искусственным интеллектом.
Tesla и её бета-версия Full Self-Driving

Только те клиенты, которые участвуют в программе раннего доступа Tesla, получат обновление программного обеспечения. Оно позволит водителям получить доступ к частично автоматизированной системе помощи водителю автопилота на городских улицах. Программа раннего доступа используется как платформа для тестирования, помогающая устранять программные ошибки.
Это переписывание, по словам Маска, позволит автомобилям Tesla интерпретировать окружающую среду в четырех измерениях, а не в двух. Маск уверен — это приведет к повышению производительности и более быстрому обновлению ПО.
Автопилот не может выполнять некоторые из этих задач, если маркеры полосы дороги блеклые или отсутствуют, и он не может делать повороты. Водитель также должен постоянно держать руль, иначе автопилот выдаст серию предупреждений, прежде чем в конечном итоге полностью отключится. Но, когда эти функции работают согласованно, может казаться, что машина едет сама, но водитель по-прежнему несет ответственность, если машина допустила ошибку или разбилась. (Было несколько аварий со смертельным исходом с участием автомобилей Tesla с включенным автопилотом.)
Во время разговора Маск утверждал, что преимущество Tesla в области автономного вождения связано с наличием большого парка транспортных средств — около 930 000 — уже находящихся на дорогах. Эти автомобили записывают ситуации и предоставляют данные для обучения для улучшения нейронных сетей, необходимых для программного обеспечения ИИ, которое и обеспечивает работу беспилотных автомобилей. Подход компании к автономным транспортным средствам в первую очередь ориентирован на компьютерное зрение или использование камер.


Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми.

Часть первая
В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства.
Первые разработки
Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:

Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.

Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантастика
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.

В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!"

На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”

Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Поп культура
Уолт Дисней вывел воображение на новый уровень.
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Часть вторая: Исследования и разработки
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.


Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.

Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
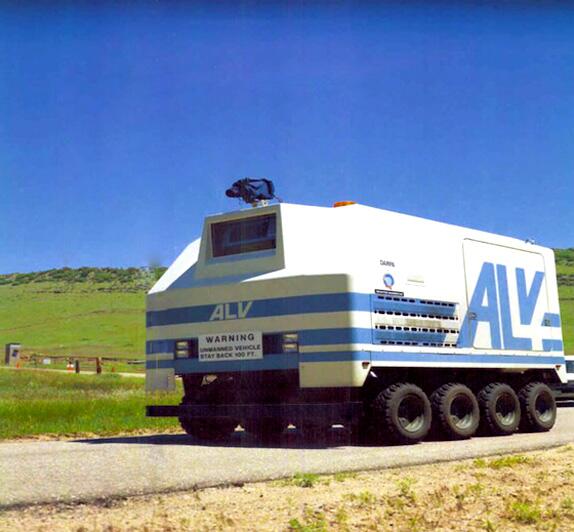
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.

Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.
Также в 1995 году разработанная в CMU машина Navlab 5 проехала на автопилоте, но с ручным контролем бокового движения, из Питтсбурга, штат Пенсильвания, в Сан-Диего, штат Калифорния, в рамках тура “No Hands Across America”. В этом видео с History Channel 1998 года кратко рассказывается о деятельности CMU Navlab в 1990-е годы:
В 1996 году в Италии, в университете Пармы, Альберто Броджи основал проект ARGO. В 1998 году автомобиль MilleMiglia в рамках тура Automatico проехал в режиме автопилота 2000 км. Отчет команда опубликовала в этом видео 10 лет спустя.
В 1997 году Национальная программа исследования автоматизированных автомобильных систем (NAHS) Министерства транспорта США завершилась тем, что беспилотные автомобили, автобусы и грузовики проехали по трассе I-15 в Сан-Диего, Калифорния.

Контроль за боковым движением осуществлялся с помощью компьютерного зрения и магнитов, встроенных в дорогу. Расстояние между автомобилями регулировали радиолокационные или лидарные датчики.

В рамках проекта на испытательных площадках Volkswagen проводились тест-драйвы производимых автомобилей. Машины были оснащены лидарами, камерами, радарами, GPS, цифровой маршрутной картой.

Чтобы тестируемые машины могли ездить без водителя-испытателя по замкнутому маршруту в смешанном движении среди другого транспорта, в них посадили электромеханических роботов-водителей, которые приводили в действие три педали, переключали передачи и управляли рулевым колесом.

Учитывая назначенный жесткий график, DARPA решило, что соревнование с призовым фондом станет быстрым экономическим выходом и лучшим стимулом для развития инноваций и расширения исследовательского сообщества беспилотных технологий. Первое мероприятие состоялось в 2004 году. Только 15 команд прошли отбор для участия в финальном заезде. Беспилотные самоуправляемые машины попытались пройти по 142-мильному маршруту через пустыню Мохаве (штат Невада), по грунтовым дорогам, равнинам и горным перевалам.
Команды только за 24 часа до начала мероприятия узнали GPS путевых точек. Машина CMU преуспела больше всех, проехав 7,32 мили (менее 5% от всего маршрута). Тем не менее, как правильно заметил Wired, первое из трех соревнований Grand Challenge сформировало сообщество разработчиков беспилотников таким, каким мы его знаем сейчас.
DARPA провела повторное соревнование в 2005 году (DARPA Grand Challenge). Пять команд прошли дистанцию в 132 мили, и все, кроме одного из 23 финалистов, преодолели дистанцию в 7,32 мили — обогнав лучший результат 2004 года.
Робот-автомобиль Stanley, разработанный Себастьяном Труном и его командой из Стэнфордского университета, прибыл на финиш первым, пройдя маршрут за 6 часов 54 минуты. Позже Себастьян рассказал о своей работе в Стэнфорде над Stanley в этой статье и в этой беседе:
Две машины, разработанные в Университете Карнеги-Меллона, Sandstorm и Highlander, прибыли всего через несколько минут после Стэнли. Двенадцать лет спустя команда случайно обнаружит, что фильтр между модулем управления двигателем и топливными форсунками (одной из всего лишь двух электронных частей в двигателе Hummer 1986 года) был сломан и привел к потере мощности двигателя.
Соревнование DARPA Urban Challenge 2007 года DARPA перенесла в городскую местность, на место ныне закрытой военно-воздушной базы Джорджа в Викторвилле, штат Калифорния. Команды должны были пройти маршрут по городу, проезжая через четырехполосные перекрестки, заблокированные дороги или парковки, находясь в смешанном движении с беспилотниками и машинами, управляемыми людьми. Более 90 команд подали заявки на участие в Urban Challenge. 53 команды приняло участие в отборе, 36 были приглашены на полуфинальное мероприятие, и всего 11 приняло участие в финальной гонке.
DARPA сочла необходимым, чтобы в потоке машин рядом с роботами находились люди и представители DARPA, оценивающие производительность роботов. Впервые на мероприятие образовалась пробка из беспилотных автомобилей, а также первое, хоть и незначительное, столкновение двух беспилотников.

Junior Стэнфордского университета и Victor Tango Политехнического университета Виргинии на соревновании DARPA Urban Challenge 2007-го года.

Автомобиль Boss Университета Карнеги-Меллона пересекает финишную черту.
После Urban Challenge проводились ещё несколько, в основном научно-исследовательских, мероприятий. Среди них проект Stadtpilot в Техническом университете Брауншвейг, нацеленный на вождение в городской среде, включая смену полосы движения, парковку и включение в движущийся поток. В 2010 году проект Vislab Intercontinental Autonomous Challenge, в котором колонна из четырех беспилотников, следуя за ведущим автомобилем, проехала 13000 км из Пармы (Италия) до Шанхая (Китай). В 2012 для гонки Pikes Peak в Стэнфорде построили гоночный беспилотник.
Grand Cooperative Driving Challenge – соревнование, проводимое в Европе в 2011 и 2016 годах, в котором машины должны были следовать за лидирующим автомобилем, реагировать на его колебания, совместно стартовать на светофорах и объединяться в колонну.
Соревнование Urban Challenge ознаменовало переход от научных исследований к промышленному развитию — которое мы будем освещать в следующей части. Загадочный 20-ти летний барьер был окончательно преодолен.
Продолжение следует.

Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.

Несколько лет назад автопромышленность смело предсказывала выход полностью беспилотных автомобилей 5 уровня в 2020 или 2021 году, но эта задача оказалась куда более сложной, чем они думали.
Популярная в последнее время концепция беспилотных автомобилей, на которых можно поехать куда угодно и когда угодно (или автомобилей, в которых можно спать на заднем сидении во время езды) несколько притормозила, так как автопроизводители признали, что разработка технологии полноценного беспилотного управления оказалась более сложной, чем ожидалось.
Дилемма пятого уровня
И не только Ford делал такие заявления. Honda публично обсуждала возможность появления автомобилей без водителей на улицах Токио к летним Олимпийским играм 2020 года. Volvo, Hyundai, Daimler, Tesla, Fiat Chrysler, Renault-Nissan и другие планировали выпуск таких автомобилей в диапазоне с 2018 по 2025 год. Некоторые говорили о моделях с ограниченными возможностями: например, сначала будет доступна только езда по шоссе, а затем появятся и городской функционал. Но послание было по сути тем же: будущее у нас на пороге.

В 2016 г. Ford смело спрогнозировал, что в 2021 г. у него будут автомобили без рулевого колеса, педали газа или тормоза.
Конечно же, сегодня эта повестка не сильно отличается от того, что было в прошлом. Будущее с беспилотным транспортом все еще ожидается, но тон риторики смягчается. Большинство OEM-производителей сейчас более откровенно говорят о том, что путь к полной автономности в автомобилях будет представлять собой последовательность маленьких, постепенных шагов. Сначала появится автоматическое аварийное торможение. Затем роботизированная доставка пакетов и беспилотное такси по районам, находящимся в рамках гео-ограждения. Водители сначала будут сидеть у руля, а затем исчезнут. Высокая степень автоматизации — так называемый 4-ый уровень — появится только в определенных местах. Но Священный Грааль беспилотной езды — полный 5-ый уровень во всех автомобилях, обеспечивающий езду куда угодно и когда угодно — теперь признан более сложным.
Причин такой сложности много. Во-первых, это погода. Инсайдеры отрасли говорят, что не случайно наиболее выдающиеся автономные программы тестирования расположены в Калифорнии, Аризоне и Неваде, а не в штате Мэн или Миннесота.
И дело не только в том, что снежинки в воздухе блокируют обратный сигнал. Снег также имеет тенденцию накапливаться на обочинах и на середине дороги, перекрывая дорожную разметку, которая так важна для автоматического распознавания полос движения.
Вызовы, связанные с тестированием
Возможно, самым большим техническим препятствием является преобразование человеческого разума в ИИ. Интеллект, позволяющий человеку управлять автомобилем, во многом воспринимается как нечто само собой разумеющееся, и его воспроизведение оказывается более трудоемким делом, чем предполагали инженеры.
И хотя эти ситуации могут показаться простыми для водителей-людей, они не так просты для машин. Например, когда в 200-х ярдах впереди ветром на дорогу выносит картонную коробку, водители-люди быстро определяют, стоит ли им переехать ее или объехать. Для компьютера это не так просто. Это кусок металла? Тяжелый или легкий? Знает ли машина вообще, что тяжелый кусок металла не вылетает от ветра на проезжую часть? Все эти вопросы очень сложны для ИИ.
Большинство таких проблем необходимо решать с помощью тестов – либо проезжая физические мили, либо выполняя программное моделирование. Оба подхода имеют свое место, в основном потому, что программное моделирование не может предвидеть каждую случайность. Например, когда автомобиль прибывает на all-way stop в то же время, что и другое транспортное средство, для машины возникает дилемма. Водители-люди могут сделать какой-либо жест или посмотреть в глаза другому водителю, но микроконтроллеры всего этого не умеют. Некоторые разработчики в настоящее время учат свои транспортные средства чуть двигаться вперед, следя за другим транспортным средством для получения подразумеваемого согласия, но такие ситуации не являются простыми и, как правило, не могут быть смоделированы сегодня.
Производители систем моделирования работают над этим, и успешно расширяют количество испытаний, которые могут быть выполнены программно. Сегодня, по словам экспертов, симулировать можно двумя способами: во-первых, записывая реальные события и проигрывая их в программном обеспечении, и, во-вторых, увеличивая количество испытаний, чтобы включить в них ситуации, которые не были записаны.
Как для поставщиков, так и для OEM-производителей, такие процедуры представляют собой дивный новый мир испытаний и проверок. Поставщики утверждают, что этот процесс является отклонением от всех процедур испытания, использовавшихся до появления беспилотных автомобилей. По их словам, беспилотным автомобилям уже недостаточно просто предоставить деталь, которая соответствует предписанной спецификации. Поставщики теперь должны помочь своим клиентам разобраться в разработке датчиков и алгоритмов, в контексте случаев их использования, а не в терминах простых спецификаций.
Автопроизводители уходят в тень
Большая проблема во всем этом для автопроизводителей — деньги. Производители тратят огромные суммы денег в своих программах разработки систем автономной езды, и постоянно ищут инвесторов, чтобы привлечь больше. GM Cruise LLC, например, недавно объявила об инвестициях в акционерный капитал в размере 1,15 миллиарда долларов от группы институциональных инвесторов. Новое финансирование принесло компании ошеломляющие 19 миллиардов долларов – около трети от общей стоимости General Motors Corp. Cruise планирует использовать эти деньги, чтобы удвоить штат сотрудников и втрое увеличить площадь офисных помещений в Сан-Франциско.

В 2016 году General Motors инвестировала около 600 миллионов долларов в экспертизу робототехники Cruise Automation.
Однако такие цифры фигурируют не только у GM. Большая часть промышленности тратит огромные суммы одновременно. Ford, например, инвестировал 1 миллиард долларов в Argo AI; Toyota вложила 1 миллиард долларов в Toyota Research Institute; GM инвестировала 500 миллионов долларов в Lyft, Inc.; Volvo вошла в совместное предприятие с Uber Technologies Inc. и вложила 300 миллионов долларов, а Intel, как говорят, потратила 15,3 миллиарда долларов на приобретение Mobileye.
Вот почему некоторые компании сейчас отступают от краткосрочных прогнозов, сказал исполнительный директор. Они видят количество необходимых испытаний, инженерные требования и стоимость, и им интересно, сколько времени это займет.
В частном порядке, большинство инженеров сомневаются в заявлениях Маска. Впрочем, они предпочитают не высказываться и оставаться в тени. Некоторые намекают на появление полноценного 5-го уровня в конце 2020-х или начале 2030-х годов. Но, в целом, автопроизводители говорят, что они больше не занимаются прогнозированием.
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
Сейчас около 60 компаний занимаются разработкой и выпуском на рынок автомобилей с автопилотом. Кто из них добился наибольшего успеха в 2020 году? Для начала разберемся, что такое автомобиль с автопилотом вообще.
Поскольку эти уровни не имеют большого значения для людей, не относящихся к отрасли, производители автомобилей часто не говорят о своих технологиях в этих конкретных условиях SAE. Наиболее интересны для людей либо автомобили, которые большую часть пути по шоссе находятся в режиме самоуправления (уровень 3), либо автомобили, которые могут ездить почти самостоятельно, за исключением нескольких условий (уровень 4).
Итак, какие компании отличились разработками в области беспилотных автомобилей и как в 2020 году?
Cruise — тестирует полностью беспилотные автомобили в Сан-Франциско
Cruise, компания по производству беспилотных автомобилей, аффилированная с General Motors и Honda, тестирует в Сан-Франциско автомобили без водителя, за рулем которого не должен сидеть человек. Компания одной из первых протестировала свои беспилотные автомобили 4-ого уровня в плотной и сложной городской среде.
На видео, опубликованном компанией, сотрудник Cruise сидит на пассажирском сиденье, пока машина едет по темным улицам Сан-Франциско. Все автомобили Cruise имеют аварийный выключатель в центральном канале рядом с переключателем передач на случай, если что-то пойдет не так.
Cruise стала пятой компанией, получившей разрешение на использование автопилота без водителя от Департамента автотранспортных средств штата. Другие компании — Waymo, Nuro, Zoox и AutoX.
Это первый раз, когда Cruise продемонстрировала свои возможности автомобиля уровня 4. Его главный конкурент, дочерняя компания Google Waymo, уже более года тестирует свои полностью беспилотные автомобили в Фениксе и недавно объявила, что сделает свою службу такси уровня 4 доступной для большего числа клиентов.
В прошлом году Cruise представила Cruise Origin, полностью беспилотный прототип автомобиля без рулевого колеса, педалей и каких-либо элементов управления, обычно связанных с вождением человека. Автомобиль, который будет запущен в производство на заводе GM в Детройте-Хамтрамке, построен для совместного использования несколькими пассажирами. Хотя насколько востребован общий транспорт в мире после COVID-19, неизвестно. Cruise недавно представила новый набор протоколов безопасности, направленных на то, чтобы люди оставались социально дистанцированными во время поездок, а транспортное средство дезинфицировалось между поездками.
Google Waymo — открывает доступ к своим беспилотным автомобилям
Waymo, самоуправляемое подразделение Alphabet, объявило, что откроет свои полностью беспилотные автомобили для всех клиентов службы вызова пассажиров в Фениксе, штат Аризона. Раньше к беспилотникам допускалось только несколько человек. Теперь более тысячи пользователей сервиса смогут ездить на автомобиле Waymo без водителя на переднем сиденье.
Waymo тестирует свои автомобили в районе Феникса с начала 2017 года. Беспилотные автомобили компании работают на территории площадью около 260 квадратных км. В конце 2018 года компания запустила ограниченную общедоступную службу вызова пассажиров под названием Waymo One, но единственными клиентами, которые получили доступ, были люди, которые сначала прошли проверку в рамках программы бета-тестирования ранних моделей Waymo. Компания сообщила, что у нее около 1500 активных пользователей в месяц из обеих программ.
Ранее только участникам программы Waymo было разрешено ездить в беспилотных автомобилях компании. Им надо было подписывать с компанией соглашение о неразглашении, чтобы получить доступ к ранним версиям технологии Waymo. Это запрещает им выступать публично, когда, скажем, одна из их поездок отклоняется от курса.
Для начала компания планирует предлагать поездки без водителя только для клиентов Waymo One — хотя эти люди могут брать с собой в поездку друзей и семью, заявил в своем блоге генеральный директор Waymo Джон Крафчик. В течение следующих нескольких недель еще больше людей будет приглашено подписаться на Waymo One. У компании есть список ожидания, из которого она выбирает участников.
Отметим, что эти беспилотные автомобили не совсем бесконтрольные. У Waymo есть команда удаленных сотрудников, которые в реальном времени следят с восьми камер за трансляциями каждого автомобиля и могут помочь одним нажатием кнопки, если программа попадает в трудное место и требует человеческого вмешательства, чтобы понять, что происходит. Но Waymo настаивает на том, что, все же, автопилот будет принимать большинство решений о вождении благодаря своей объемной компьютерной системе и программному обеспечению с искусственным интеллектом.
Tesla и её бета-версия Full Self-Driving
Только те клиенты, которые участвуют в программе раннего доступа Tesla, получат обновление программного обеспечения. Оно позволит водителям получить доступ к частично автоматизированной системе помощи водителю автопилота на городских улицах. Программа раннего доступа используется как платформа для тестирования, помогающая устранять программные ошибки.
Это переписывание, по словам Маска, позволит автомобилям Tesla интерпретировать окружающую среду в четырех измерениях, а не в двух. Маск уверен — это приведет к повышению производительности и более быстрому обновлению ПО.
Автопилот не может выполнять некоторые из этих задач, если маркеры полосы дороги блеклые или отсутствуют, и он не может делать повороты. Водитель также должен постоянно держать руль, иначе автопилот выдаст серию предупреждений, прежде чем в конечном итоге полностью отключится. Но, когда эти функции работают согласованно, может казаться, что машина едет сама, но водитель по-прежнему несет ответственность, если машина допустила ошибку или разбилась. (Было несколько аварий со смертельным исходом с участием автомобилей Tesla с включенным автопилотом.)
Во время разговора Маск утверждал, что преимущество Tesla в области автономного вождения связано с наличием большого парка транспортных средств — около 930 000 — уже находящихся на дорогах. Эти автомобили записывают ситуации и предоставляют данные для обучения для улучшения нейронных сетей, необходимых для программного обеспечения ИИ, которое и обеспечивает работу беспилотных автомобилей. Подход компании к автономным транспортным средствам в первую очередь ориентирован на компьютерное зрение или использование камер.
Пасхальное воскресенье 1900 года, на фотографии — Пятая авеню, Нью-Йорк. Среди моря конных экипажей едва ли в левой полосе можно разглядеть единственный автомобиль. Пройдет всего 13 лет, и мы увидим аналогичную фотографию, с той разницей лишь, что среди многочисленных автомобилей будет ехать всего одна повозка, запряженная лошадьми.
Часть первая
В настоящий момент автомобильная промышленность переживает одновременно три революции: электрификацию трансмиссии, подключение пассажирских транспортных средств к единой сети и замену водителей автономными системами вождения. Эти процессы не только идут параллельно, но и в значительной мере влияют на автомобилестроение, подобно тому, как в свое время революция подтолкнула заменить конные повозки на самоходный транспорт. Это первая часть короткой серии блогов, в которой делается попытка охватить историю беспилотников, от задумки до производства.
Первые разработки
Изобретения в области авионики и радиотехники вдохновили создание первых автоматизированных уличных транспортных средств: в 1914 году во Франции был продемонстрирован первый автопилот самолета на гироскопическом стабилизаторе:
Первый автопилот на биплане.
В 1920-х появилось радиоуправление для кораблей:
Радиоуправляемый автомобиль был впервые представлен компанией RCA в октябре 1921 года в Дейтоне, штат Огайо.
Управление трехколесным транспортным средством осуществлялось беспроводным путем с радиотехнического оборудования на другом автомобиле. Аналогичный радиоуправляемый автомобиль был продемонстрирован в 1925 году на Пятой авеню в Нью-Йорке. За беспилотной машиной вплотную следовал второй автомобиль, в котором находились радиопередатчики и оператор.
Фантастика
Фантазия о беспилотном транспорте почти также стара, как и сам дебют первого автомобиля. А все началось с обыкновенного вымысла.
В 1918 году в одном журнале уже был нарисован трамвай, не управляемый водителем, с подписью: “мечта автомобилиста: автомобиль, который управляется набором кнопок.” В статье говорилось, что “… в будущем автомобиль с рулевым колесом также устареет, как сегодня устарел автомобиль с ручным насосом для газа или масла!"
На Всемирной выставке 1939 года в Нью-Йорке General Motors в экспозиции Futurama представил посетителям свое видение 1960 года: автоматизированные транспортные средства на многополосных автомагистралях. Это случилось за 17 лет до того, как Федеральный закон о многополосных автострадах разрешил строительство сети межштатных автомагистралей протяженностью 41 000 миль по всей территории США.
В 1956 году американские энергокомпании рекламировали, что «в один прекрасный день ваш автомобиль сможет мчаться по электрическому супер-шоссе, его скорость и руление будут автоматически контролироваться электронными устройствами, встроенными в дорогу. Автомобильные дороги станут безопасными благодаря электричеству! Никаких пробок… никаких аварий… никакой усталости водителя.”
Firebird III на выставке “Century 21 Exposition”, Сиэтл, 1962 год. Автомобиль должен был управляться с помощью дорожного кабеля, а взаимодействие с инфраструктурой контролировало бы боковое движение.
Firebird IV был не функциональным транспортным средством, как его предшественники, а концепцией, ориентированной на тот день, когда автомобили будут ехать по шоссе и управляться не водителем, а автоматически программируемыми системами наведения, которые обеспечат абсолютную безопасность при развитии скорости более чем в 2 раза от разрешенной сегодня. Как только автомобиль выедет с шоссе, контроль будет передан водителю, и уже он будет вести машину по улицам.
Поп культура
Уолт Дисней вывел воображение на новый уровень.
Возможно, самым способным вымышленным роботом-автомобилем в 1980-е годы был KITT из телесериала Knight Rider.
Эпоха беспилотных автомобилей началась 100 лет назад. Вдохновленные достижениями в области гироскопических стабилизаторов, радио-и радиолокационных технологий, журналы, газеты и фильмы рисуют автомобили, которые могли бы управлять собой сами. Многие из этих источников ожидали появление технологий примерно через 20 лет, (распространенная временная константа в истории автоматизированных транспортных средств). В то время как изучение беспилотных технологий началось в конце 1950-х — о них речь пойдет в следующей части — потребовалось еще 50 лет, чтобы преодолеть загадочный 20-летний барьер.
Часть вторая: Исследования и разработки
Исследования по созданию беспилотного или роботизированного транспорта начались в конце 1950-х годов. Джеймсон Ветмор подробно описывает 60-летнюю историю создания автоматизированных систем автомобильных дорог в Америке и идеи, лежащие в их основе. Прочитать можно здесь и здесь. В 1958 году General Motors и компания Radio Corporation of America (RCA) совместно проводили испытания автоматизированных прототипов дорог, оснащенных радиоуправляемым контролем скорости и руления автомобиля.
Впервые сконструированная около 1960-го, Stanford Cart была предназначена для изучения возможности управления луноходом с Земли. В течение последующих десятилетий группа аспирантов дорабатывала карт. Главное усовершенствование внес Ханс Моравек. Он оснастил карт стереозрением, которое позволило ему самостоятельно перемещаться по заполненной стульями комнате — ушло на это всего 5 часов — 1979 год.
Первый автоматизированный автомобиль с восприятием окружающей среды был разработан в 1977 году в лаборатории машиностроения Университета Цукуба. Исследовательская группа занималась разработкой беспилотных транспортных средств на протяжении 20 лет. В этом документе 1994 года говорится о транспортном средстве, сконструированном компанией Toyota. С помощью одной камеры машина была способна проехать по разметке 50 м со скоростью 50 км/ч.
Разработанный в 1980-х годах автономный наземный автомобиль DARPA (ALV) представлял собой восьмиколесного робота высотой 12 футов с несколькими датчиками, перед которым была поставлена задача пройти от точки A до точки B, поднимаясь по холмам без помощи человека. Эксперимент проходил за пределами Денвера в 1985 году.
Тогда было установлено, что «осмысленное соединение глобальной цифровой карты с локальной сенсорной информацией — ключ к целенаправленному автономному вождению.”
Финальная демонстрация проекта „Прометей“ состоялась на парижской трассе A1, где автомобиль VAmP профессора Дикманнса проехал более 1000 км, развив скорость до 130 км/ч.
Он автоматически пропускал более медленные автомобили в левом ряду и одновременно отслеживал до двенадцати других автомобилей. В 1995 году команда проехала 1758 км от Мюнхена до Дании и обратно со скоростью до 175 км/ч, продольное и боковое управление осуществлялось с помощью компьютерного зрения. Самый большой участок, который удалось проехать в режиме автопилота, составил 158 км. Профессор Дикманс рассказывает о развитии технологий в этой области начиная с 1950-х годов и по настоящий момент на конференции в 2011 году.
Также в 1995 году разработанная в CMU машина Navlab 5 проехала на автопилоте, но с ручным контролем бокового движения, из Питтсбурга, штат Пенсильвания, в Сан-Диего, штат Калифорния, в рамках тура “No Hands Across America”. В этом видео с History Channel 1998 года кратко рассказывается о деятельности CMU Navlab в 1990-е годы:
В 1996 году в Италии, в университете Пармы, Альберто Броджи основал проект ARGO. В 1998 году автомобиль MilleMiglia в рамках тура Automatico проехал в режиме автопилота 2000 км. Отчет команда опубликовала в этом видео 10 лет спустя.
В 1997 году Национальная программа исследования автоматизированных автомобильных систем (NAHS) Министерства транспорта США завершилась тем, что беспилотные автомобили, автобусы и грузовики проехали по трассе I-15 в Сан-Диего, Калифорния.
Контроль за боковым движением осуществлялся с помощью компьютерного зрения и магнитов, встроенных в дорогу. Расстояние между автомобилями регулировали радиолокационные или лидарные датчики.
В рамках проекта на испытательных площадках Volkswagen проводились тест-драйвы производимых автомобилей. Машины были оснащены лидарами, камерами, радарами, GPS, цифровой маршрутной картой.
Чтобы тестируемые машины могли ездить без водителя-испытателя по замкнутому маршруту в смешанном движении среди другого транспорта, в них посадили электромеханических роботов-водителей, которые приводили в действие три педали, переключали передачи и управляли рулевым колесом.
Учитывая назначенный жесткий график, DARPA решило, что соревнование с призовым фондом станет быстрым экономическим выходом и лучшим стимулом для развития инноваций и расширения исследовательского сообщества беспилотных технологий. Первое мероприятие состоялось в 2004 году. Только 15 команд прошли отбор для участия в финальном заезде. Беспилотные самоуправляемые машины попытались пройти по 142-мильному маршруту через пустыню Мохаве (штат Невада), по грунтовым дорогам, равнинам и горным перевалам.
Команды только за 24 часа до начала мероприятия узнали GPS путевых точек. Машина CMU преуспела больше всех, проехав 7,32 мили (менее 5% от всего маршрута). Тем не менее, как правильно заметил Wired, первое из трех соревнований Grand Challenge сформировало сообщество разработчиков беспилотников таким, каким мы его знаем сейчас.
DARPA провела повторное соревнование в 2005 году (DARPA Grand Challenge). Пять команд прошли дистанцию в 132 мили, и все, кроме одного из 23 финалистов, преодолели дистанцию в 7,32 мили — обогнав лучший результат 2004 года.
Робот-автомобиль Stanley, разработанный Себастьяном Труном и его командой из Стэнфордского университета, прибыл на финиш первым, пройдя маршрут за 6 часов 54 минуты. Позже Себастьян рассказал о своей работе в Стэнфорде над Stanley в этой статье и в этой беседе:
Две машины, разработанные в Университете Карнеги-Меллона, Sandstorm и Highlander, прибыли всего через несколько минут после Стэнли. Двенадцать лет спустя команда случайно обнаружит, что фильтр между модулем управления двигателем и топливными форсунками (одной из всего лишь двух электронных частей в двигателе Hummer 1986 года) был сломан и привел к потере мощности двигателя.
Соревнование DARPA Urban Challenge 2007 года DARPA перенесла в городскую местность, на место ныне закрытой военно-воздушной базы Джорджа в Викторвилле, штат Калифорния. Команды должны были пройти маршрут по городу, проезжая через четырехполосные перекрестки, заблокированные дороги или парковки, находясь в смешанном движении с беспилотниками и машинами, управляемыми людьми. Более 90 команд подали заявки на участие в Urban Challenge. 53 команды приняло участие в отборе, 36 были приглашены на полуфинальное мероприятие, и всего 11 приняло участие в финальной гонке.
DARPA сочла необходимым, чтобы в потоке машин рядом с роботами находились люди и представители DARPA, оценивающие производительность роботов. Впервые на мероприятие образовалась пробка из беспилотных автомобилей, а также первое, хоть и незначительное, столкновение двух беспилотников.
Junior Стэнфордского университета и Victor Tango Политехнического университета Виргинии на соревновании DARPA Urban Challenge 2007-го года.
Автомобиль Boss Университета Карнеги-Меллона пересекает финишную черту.
После Urban Challenge проводились ещё несколько, в основном научно-исследовательских, мероприятий. Среди них проект Stadtpilot в Техническом университете Брауншвейг, нацеленный на вождение в городской среде, включая смену полосы движения, парковку и включение в движущийся поток. В 2010 году проект Vislab Intercontinental Autonomous Challenge, в котором колонна из четырех беспилотников, следуя за ведущим автомобилем, проехала 13000 км из Пармы (Италия) до Шанхая (Китай). В 2012 для гонки Pikes Peak в Стэнфорде построили гоночный беспилотник.
Grand Cooperative Driving Challenge – соревнование, проводимое в Европе в 2011 и 2016 годах, в котором машины должны были следовать за лидирующим автомобилем, реагировать на его колебания, совместно стартовать на светофорах и объединяться в колонну.
Соревнование Urban Challenge ознаменовало переход от научных исследований к промышленному развитию — которое мы будем освещать в следующей части. Загадочный 20-ти летний барьер был окончательно преодолен.
Продолжение следует.
Мы большая компания-разработчик automotive компонентов. В компании трудится около 2500 сотрудников, в том числе 650 инженеров.
Мы, пожалуй, самый сильный в России центр компетенций по разработке автомобильной электроники. Сейчас активно растем и открыли много вакансий (порядка 30, в том числе в регионах), таких как инженер-программист, инженер-конструктор, ведущий инженер-разработчик (DSP-программист) и др.
У нас много интересных задач от автопроизводителей и концернов, двигающих индустрию. Если хотите расти, как специалист, и учиться у лучших, будем рады видеть вас в нашей команде. Также мы готовы делиться экспертизой, самым важным что происходит в automotive. Задавайте нам любые вопросы, ответим, пообсуждаем.
Читайте также: