
Тахометр компьютер как подключить
Добавил пользователь Алексей Ф. Обновлено: 21.09.2024
Добрый день.
Выношу на Ваше рассмотрение схему простенького цифрового тахометра на AVR ATtiny2313, КР514ИД2, и оптопаре спроектированного мною.
Сразу оговорюсь: аналогичных схем в интернете много. У каждой реализации свои плюсы и минусы. Возможно, кому-то мой вариант подойдет больше.
Начну, пожалуй, с тех. задания.
Задача: нужно сделать цифровой тахометр для контроля оборотов электрического двигателя станка.
Вводные условия: Есть готовый реперный диск на 20 отверстий от лазерного принтера. В наличии много оптопар от сломанных принтеров. Средние (рабочие) обороты 4 000-5 000 оборотов/минуту. Погрешность отображаемых результатов не должна превышать ± 100 оборотов.
Ограничение: питание для блока управление составляет 36В (тахометр будет установлен в один корпус с блоком управления – об этом ниже).
Маленькое лирическое отступление. Это станок моего друга. На станке установлен электромотор PIK-8, обороты которого контролируются согласно найденной в интернете и модифицированной схеме. По просьбе друга и был разработан простенький тахометр для станка.
Изначально в схеме планировалось применить ATMega16, но рассмотрев условия, решено было ограничиться ATtiny2313, работающего от внутреннего (RC) генератора на частоте 4 Мгц.
Общая схема выглядит следующим образом:

При необходимости внесения изменений в прошивку тахометра на плате предусмотрен разъем ISP.
На схеме подтягивающий резистор R12, номиналом 30 кОм, подобран опытным путём для конкретной оптопары. Как показывает практика – для разных оптопар он может отличаться, но среднее значение в 30 кОм должно обеспечить устойчивую работу для большинства принтерных оптопар. Согласно документации к ATtiny2313, величина внутреннего подтягивающего резистора составляет от 20 до 50 кОм в зависимости от реализации конкретной партии микроконтроллеров, (стр. 177 паспорта к ATtiny2313), что не совсем подходит. Если кто захочет повторить схему, может для начала включать внутренний подтягивающий резистор, возможно у Вас, для Вашей оптопары и вашего МК работать будет. У меня, для моего набора не заработало.

Так выглядит типичная оптопара от принтера.
Светодиод оптопары запитан через ограничивающий резистор на 1К, который я разместил непосредственно на плате с оптопарой.
Для фильтрации пульсаций напряжения на схеме два конденсатора, электролитический на 220 мкФ х 25В (что было под рукой) и керамический на 0,1 мкФ, (общая схема включения микроконтроллера взята из паспорта ATtiny2313).
Для защиты от пыли и грязи плата тахометра покрыта толстым слоем автомобильного лака.
Замена компонентов.
Можно применить любой светодиодный индикатор на четыре цифры, либо два сдвоенных, либо четыре поодиночных. На худой конец, собрать индикатор на отдельных светодиодах.
Вместо КР514ИД2 можно применить КР514ИД1 (которая содержит внутри токоограничивающие резисторы), либо 564ИД5, К155ПП5, К155ИД9 (при параллельном соединении между собой ножек одного сегмента), или любой другой преобразователь двоичного в семисегментный (при соответствующих изменениях подключения выводов микросхем).
Транзисторы VT1-VT4 – любые слаботочные, работающие в режиме ключа.
Принцип работы основан на подсчете количества импульсов полученных от оптопары за одну секунду и пересчет их для отображения количества оборотов в минуту. Для этого использован внутренний счетчик Timer/Counter1 работающий в режиме подсчета импульсов поступающих на вход Т1 (вывод PD5 ножка 9 МК). Для обеспечения стабильности работы, включен режим программного подавления дребезга. Отсчет секунд выполняет Timer/Counter0 плюс одна переменная.
Расчет оборотов, на чем хотелось бы остановиться, происходит по следующей формуле:
M = (N / 20) *60,
где M – расчетные обороты в минуту (60 секунд), N – количество импульсов от оптопары за одну секунду, 20 – число отверстий в реперном диске.
Итого, упростив формулу получаем:
M = N*3.
Но! В микроконтроллере ATtiny2313 отсутствует функция аппаратного умножения. Поэтому, было применено суммирование со смещением.
Для тех, кто не знает суть метода:
Число 3 можно разложить как
3 = 2+1 = 2 1 + 2 0 .
Если мы возьмем наше число N сдвинем его влево на 1 байт и приплюсуем еще одно N сдвинутое влево на 0 байт – получим наше число N умноженное на 3.
В прошивке код на AVR ASM для двухбайтной операции умножения выглядит следующим образом:
Mul2bytes3:
CLR LoCalcByte //очищаем рабочие регистры
CLR HiCalcByte
mov LoCalcByte,LoInByte //грузим значения полученные из Timer/Counter1
mov HiCalcByte,HiInByte
CLC //чистим быт переноса
ROL LoCalcByte //сдвигаем через бит переноса
ROL HiCalcByte
CLC
ADD LoCalcByte,LoInByte //суммируем с учетом бита переноса
ADC HiCalcByte,HiInByte
ret
Проверка работоспособности и замер точности проводился следующим образом. К вентилятору компьютерного куллера был приклеен картонный диск с двадцатью отверстиями. Обороты куллера мониторились через BIOS материнской платы и сравнивались с показателями тахометра. Отклонение составило порядка 20 оборотов на частоте 3200 оборотов/минуту, что составляет 0,6%.
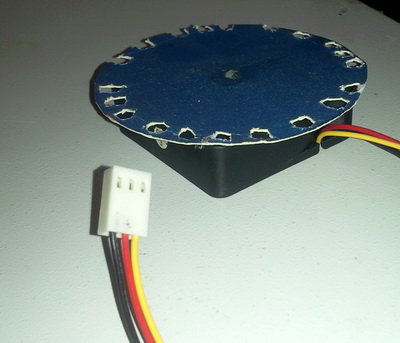
Вполне возможно, что реальное расхождение составляет меньше 20 оборотов, т.к. измерения материнской платы округляются в пределах 5 оборотов (по личным наблюдениям для одной конкретной платы).
Верхний предел измерения 9 999 оборотов в минуту. Нижний предел измерения, теоретически от ±10 оборотов, но на практике не замерялся (один импульс от оптопары в секунду дает 3 оборота в минуту, что, учитывая погрешность, теоретически должно правильно измерять скорость от 4 оборотов в минуту и выше, но на практике данный показатель необходимо завысить как минимум вдвое).
Отдельно остановлюсь на вопросе питания.
Вся схема питается от источника 5В, расчетное потребление всего устройства не превышает 300 мА. Но, по условиям ТЗ, тахометр конструктивно должен находится внутри блока управления оборотами двигателя, а к блоку от ЛАТРа поступает постоянное напряжение 36В., чтобы не тянуть отдельный провод питания, внутри блока установлена LM317 в паспортном включении, в режиме понижения питания до 5В (с ограничивающим резистором и стабилитроном для защиты от случайного перенапряжения). Логичнее было бы использовать ШИМ-контроллер в режиме step-down конвертера, на подобии МС34063, но у нас в городе купить такие вещи проблематично, поэтому, применяли то, что смогли найти.

Фотографии платы тахометра и готового устройства.


К сожалению, сейчас нет возможности сфотографировать на станке.
После компоновки плат и первой пробной сборки, коробка с устройством отправилась на покраску.
В случае, если у Вас тахометр не заработал сразу после включения, при заведомо верном монтаже:
1) Проверить работу микроконтроллера, убедится, что он работает от внутреннего генератора. Если схема собранна правильно – на циферблате должно отображаться четыре нуля.
2) Проверить уровень импульсов от оптопары, при необходимости подобрать номинал резистора R12 или заменить схему подключения оптопары. Возможен вариант обратного подключения оптотранзистора с подтяжкой к минусу, с включенным или нет внутренним подтягивающим резистором МК. Также возможно применить транзистор в ключевом (инвертирующем) режиме работы.
P.S. по желанию заказчика тахометр отображает не один ноль, а четыре при отсутствии импульсов от оптопары.
P.P.S. Тахометр оказался очень чувствителен к перепадам оборотов двигателя. Незначительные пульсации напряжения вызывают отклонение частоты вращения, что незамедлительно отображается на экране тахометра. В будущем планирую сделать обработку для округления отображаемых результатов в пределах ±50 оборотов, если это будет нужно заказчику.

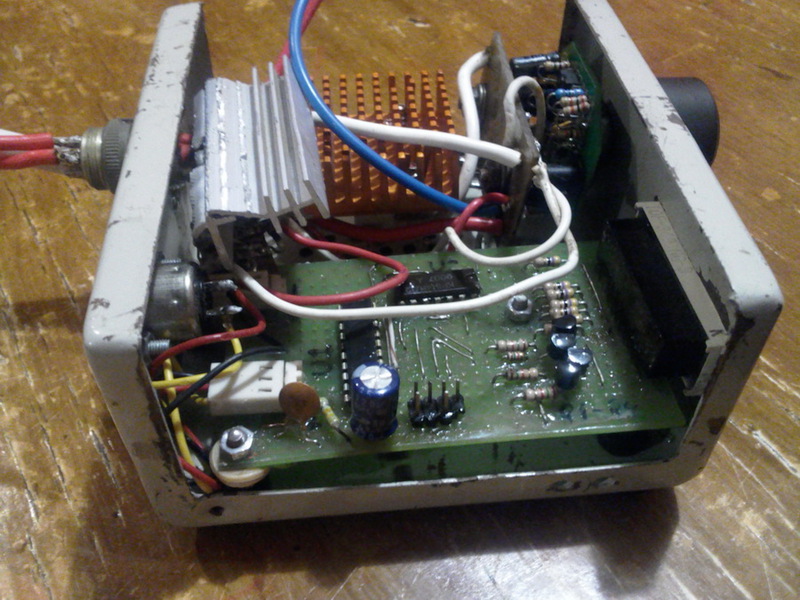
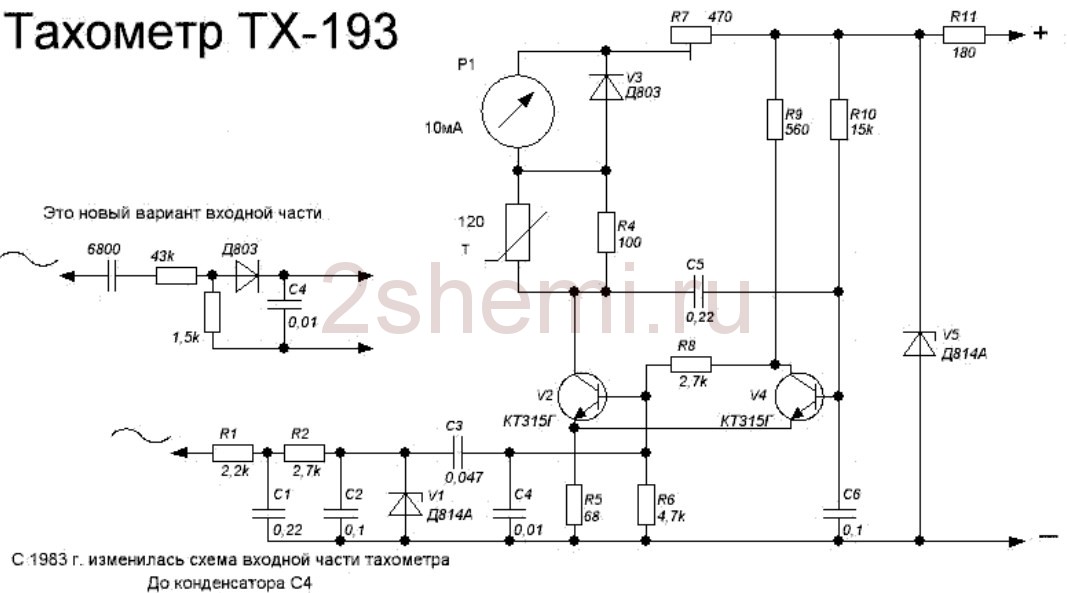
Всем привет! Хотелось бы поделиться с сообществом своей историей модернизации тахометра ТХ-193
Неделю назад обратился ко мне один человек с довольно нестандартным заданием — нужно было обеспечить работу древнего тахометра ТХ-193(ВАЗ 2106) с современным двигателем ВАЗ21126(Приора), имеющем систему зажигания с индивидуальными катушками на каждый цилиндр, а значит просто подключить ТХ-193 к катушке зажигания уже не получится. К тому-же заказчик хотел повысить эксплуатационные качества прибора, оставив не тронутым его внешний вид и дизайн. В общем дело кончилось тем, что я взялся выпотрошить электронную начинку прибора и разработать свою, с блэкджеком и шлюхами. Информацию о частоте вращения коленчатого вала тахометр теперь будет получать от ЭБУ Январь 7.2, для чего в последнем имеется специальный вывод.
Под катом фото, видео, схема, исходники и много текста, повествующего о логарифмах и о том как правильно масштабировать данные и отделаться от запятой.
Хард
Начнем с устройства ТХ-193. Механическая часть прибора представляет из себя миллиамперметр классической конструкции, с постоянным магнитом и подвижной катушкой, приводящей в движение стрелку.
Софт
На самом деле ещё до вычерчивания схемы я оперативно собрал всё это дело на макетке, взяв контроллер в DIP корпусе и сразу же принялся махать стрелкой))
В общем то софт оказался немного интереснее харда.
Начнем с общей архитектуры:
Таймер 0 тикает с частотой 250кГц, а значит период тика = 4мкс прерывание по переполнению происходит с частотой 250кГц / 256 = 0.976кГц
а значит прерывание происходит один раз в 1024мкс. Можно было заморочиться и подогнать это дело ближе к одной миллисекунде путем обновления счетчика таймера в прерывании, но в данной задаче это не к чему. Т.е. мы можем измерять время с точностью 4мкс, что вполне достаточно для заданной точности прибора.
Таймер 0 у нас не только отсчитывает время, но ещё и выставляет флажки для запуска тех или иных задач с определенной периодичностью.
Задачи у нас две. Давать отмашку прерыванию INT0 на измерение периода импульсов на входе и изменять положение стрелки.
Таймер 1 тикает с частотой 16мГц, но т.к. он 16ти битный и используется режим Phase and Frequency Correct PWM — итоговая частота ШИМ оказывается очень небольшой и составляет что-то около 122Гц. Это потому, что таймер тикает сначала вверх, а потом вниз. Зато имеем тру 16битный ШИМ и можем очень точно рулить стрелкой! В даташите найдутся все подробности.
Механика, к слову сказать, оказалась отвратительного качества, плавно двигать стрелку было не реально из-за повышенного трения в механизме, который пришлось для начала хотя-бы смазать трансмиссионным маслом. Но это уже детали.
Была составлена таблица соответствия показаний прибора с соответствующим значением регистра таймера в ШИМ попугаях.
В исходниках это дело называется GAUGE_TABLE и вынесено по привычке в отдельный файл.
Текста почему-то получается всё больше, но не остановиться более подробно на этом моменте я просто не могу!
Итак, понятно, что нам нужна логарифмическая прогрессия. Шаг изменения тока в цепи миллиамперметра должен уменьшаться по мере приближения к целевой отметке. Ресурсы на вес золота, а значит только табличный метод. Точек тоже по возможности минимум.
Начнем с построения логарифмической таблицы.
Всё очень просто: запускаем excel и несколькими взмахами мыши получаем 50 значений логарифма по основанию 2 для последовательности от 1 до 50. Для наглядности строим красивый график.
Прекрасно! То, что нужно! Но во-первых — точек аж 50, а во вторых все числа с плавающей точкой. Это нам никак не подходит!
Поэтому отбираем из имеющегося массива 5 точек с шагом 10. Получаем что-то вроде этого:
Уже лучше. Последовательное приближение к цели всё ещё сохраняется, но точек в 10 раз меньше.
Дальше нужно нормировать полученный набор. Т.е. сделать так, чтобы все значения находились в диапазоне от 0 до 1. Для этого просто разделим каждый элемент на 5,64385618977472 (максимальное значение нашего массива).
Таким образом получаем всё ту-же логарифмическую зависимость, но уже в на много более удобном для дальнейших вычислений виде. Такую таблицу уже можно довольно легко применять, если бы не точка после нуля. Но с этим мы тоже довольно легко разберемся.
Теперь я хочу, чтобы мы приняли красивое значение 1024 за единицу и снова пересчитали нашу таблицу. Получаем
Как видим, форма графика не изменилась, но цифры теперь укладываются в 16битный диапазон и нет никаких дробей.
В исходниках полученный массив называется logtable[]
Масштабирующий коэффициент(если можно его так назвать) 1024 появился здесь не случайно и нужно очень хорошо понимать почему именно 1024.
Во-первых это степень двойки и выбрана она потому, что дорогие операции деления и умножения на степень двойки можно заменить дешевым сдвигом влево/вправо и было-бы глупо не использовать такую возможность.
Во-вторых коэффициент должен выбираться и исходя из масштабов тех данных, к которым он будет применяться. В нашем случае это значения регистра 16ти разрядного таймера, который управляет заполнением ШИМа. Экспериментально было выявлено, что неудовлетворительные колебания стрелки обнаруживаются даже при её резком смещении на 200 об/мин. Т.е. если нужно двинуть стрелку на более чем ~200 об/мин — потребуется сглаживание. Из таблицы GAUGE_TABLE видно, что соседние ячейки в среднем отличаются на 4000 ШИМ попугаев, что соответствует примерно 500 об/мин на шкале прибора. Не трудно прикинуть, что в цифрах смещение стрелки на 200об будет 4000 / 2,5 = 1600 ШИМ попугаев.
Следовательно масштабирующий коэффициент нужно выбрать таким образом, чтобы во-первых он был как можно бОльшим, потому что иначе мы теряем разряды и точность, а во-вторых как можно меньшим, чтобы не заставлять нас переходить от 16ти разрядных переменных к 32х разрядным и не расходовать ресурсы понапрасну. В итоге выбираем наименьшую степень двойки, которая меньше 1600 и обеспечивает достаточную точность. Это и будет 1024.
Этот момент очень важен. Я сам до сих пор порою испытываю трудности с выбором правильных коэффициентов и размеров переменных.
Ну а дальше уж пошло-поехало. Находим в коде реализацию display_rpm() и видим, что для определения конкретного значения в ШИМ попугаях используется таблица GAUGE_TABLE[] и предположение, что между соседними отметками шкала линейна. Для организации изменения тока по логарифмическому закону введен массив на 5 точек pwm_cuve[] в котором содержится набор значений, который нужно последовательно отнять или прибавить(в зависимости от направления движения стрелки) от pwm_ocr1a_cur_val чтобы заставить стрелку двигаться плавно и чётко.
каждый шаг формируется путем умножения значения pwm_delta на коэффициент из нашей таблицы logtable[];
Перед умножением значение предварительно масштабируется путем деления на 1024.
Конечный расчётный пункт назначения стрелки target_pwm записывается в pwm_cuve[] как есть, потому что из-за проблем с округлением и из-за ограничения размерности переменных 16битами точное значение в результате расчётов будет там образовываться весьма не часто, поэтому приходится обеспечить гарантию того, что стрелка окончит свой путь в заданной точке.
В общем то всё вышесказанное по сути заключено в одной строке
pwm_cuve[ table_i ] = pwm_ocr1a_cur_val + (pwm_delta / LOG_TABLE_MAX * logtable[ table_i ]);
Далее главный цикл по сигналу от таймера0 раз в PWM_UPD_PERIOD выгребает значения из pwm_cuve и присваивает их переменной pwm_ocr1a_cur_val, значение которой в прерывании будет присвоено регистру OCR1A, что немедленно приведет к изменению заполнения ШИМа и изменению тока в цепи миллиамперметра.
Вот, собственно и почти все хитрости, за исключением перевода периода, представленного в тиках таймера в частоту вращения коленчатого вала, которая измеряется в об/мин.
Сократилось всё это до engine_rpm = (uint16_t)(15000000UL / (uint32_t)rot_time);
О том как получилась эта цифра мы можем поговорить или не поговорить в следующий раз, потому что и без того текста получилось не мало и явно не многие дочитают даже до этого места.
Немного видео, как и обещал
На точность показаний не обращайте внимание, стрелка нормально не одета + циферблат не закручен.
Движение стрелки с шагом 1000об/мин одним скачком.
Дело ясное, что в реальности скачков в 1000об/мин не будет и те незначительные перелеты стрелки, которые всё-же можно наблюдать на видео не станут проблемой. Просто если устранить и их — то можно здорово потерять в быстродействии прибора и его показания будут отставать от реальности.
До новых встреч!
Проверка прибора на автомобиле
Клиент очень доволен!
А когда увидел эту статью и все исходники, включая некоторые фото самого процесса изготовления платы — сказал, что его мозг взорван!
Если дома есть Arduino, в гараже машина или мотоцикл, а то и хоть мотособака, в голове туманные представления о программировании — возникает желание измерить скорость движения или обороты двигателя, посчитать пробег и моточасы.
В данной статье я хочу поделиться своим опытом по изготовлению подобных поделок.

Немного физики
Для измерения частоты вращения нам понадобится датчик положения колеса/вала/круга/итп. Датчик ставится как правило один. Возможно, что он будет срабатывать не один раз на каждый оборот. Например, у вас датчик Холла и 4 магнита на колесе. Таким образом, для правильного вычисления частоты нужно знать:
- количество срабатываний датчика на один оборот К;
- минимальная ожидаемая частота Мин.
- максимальная ожидаемая частота Макс.
То есть, если частота меньше разумного минимума, то считаем, что она равна нулю, если больше максимума — игнорируем показания.
С количеством срабатываний понятно, но зачем ещё эти мины и максы? Давайте рассмотрим сначала варианты расчёта частоты.
Со скоростью всё проще, достаточно знать число π, диаметр колеса, а частоту вращения мы уже знаем.
Болванка для кода
Так как мы имеем дело с такими нежными величинами как время и пространство, то лучше сразу освоить прерывания.
Обратите внимание на модификатор volatile у переменной counter. Все переменные, которые будут изменяться в обработчике прерывания (ISR) должны быть volatile. Это слово говорит компилятору, что переменная может изменяться неожиданно и доступ к ней нельзя оптимизировать.
Функция ISR() вызывается каждый раз, когда появляется единица на ноге fqPin. Мы эту функцию не вызываем, это делает сам контроллер. Он это делает, даже когда основная программа стоит в ступоре на функции delay(). Считайте, что ISR() обслуживает событие, от вас не зависящее и данное вам свыше как setup() и loop(). Контроллер прерывает выполнение вашей программы, выполняет ISR() и возвращается обратно в ту же точку, где прерывал.
Тело функции ISR() должно быть максимально коротким, точнее, сама функция должна выполняться максимально быстро. Это важно, так как прерывается выполнение вашего кода, который может оказаться чувствительным к непредвиденным задержкам. Некоторые библиотеки отключают прерывания для выполнения чувствительных с задержкам операций, например для управления светодиодной лентой WS2812.
Считаем обороты за единицу времени.
Первое, что приходит в голову, это взять интервал времени и посчитать количество измерений.
Как и у многих простых решений, у этого есть неочевидные минусы. Для повышения точности измерений вам необходим довольно большой интервал времени. Принцип тот же, что и у Шума квантования. При времени оборота колеса сравнимом с временем подсчёта, существенные изменения скорости вращения не будут замечены. Показания такого частотомера будут различаться до двух раз на каждый отсчёт.
Для повышени точности на малой скорости можно увеличить число К, как это сделано, скажем, в автомобильной технике для датчика ABS. Можно увеличить время подсчёта. Делая и то и другое мы подходим ко второй проблеме — переполнению счётчика. Да, переполнение легко лечится увеличением количества бит, но арифметика процессора Arduino не умеет считать 64-битные числа столь быстро, как хотелось бы и как она это делает с 16-разрядными.
Увеличение времени расчёта тоже не очень хорошо тк нам надо знать частоту прямо сейчас, вот при нажатии на газ, а не через пару секунд. Да и через пару секунд мы получим скорее некое среднее значение. За это время можно несколько раз сделать врумм-врумм.
Есть другой метод. Он лишён вышеописанных недостатков, но, как водится, имеет свои.
Считаем интервал между отсчётами
Мы можем засечь время одного отсчёта и другого, вычислить разницу. Величина, обратная вычисленному интервалу и есть частота. Круто! Но есть минусы.
Что делать, если наше колесо крутится еле-еле и измеренный интервал превышает разумные пределы? Выше я предложил считать частоты ниже разумного минимума за ноль.
Определённым недостатком метода можно считать шумы квантования на высоких частотах, когда целочисленный интервал снижается до нескольких двоичных разрядов.
Так же хотелось бы некую статистику подсчётов для улучшения показаний, а мы берём лишь последнее значение.
Методом проб и ошибок я подобрал интервал отображения данных на дисплее в 250мс как оптимальный. Если чаще, то цифры размазываются, если реже — бесит тормознутость.
Комбинированный метод
Можно попробовать объединить достоинства обоих методов.
То есть, мы засекаем время не просто между отсчётами, а время между проверками данных и делим на количество отсчётов за это время. Получается усреднённый интервал между отсчётами, обратная величина от которого есть частота. Предоставим компилятору оптимизировать вычисления.
Обратите внимание, что за интервал считается не время опроса, как в первом примере, а время от последнего отсчёта до предыдущего последнего отсчёта в прошлом опросе. Это заметно поднимает точность вычисления.
Таким образом, мы можем получать вполне достоверные данные как на низких так и на высоких частотах.
Если использовать кооперативную многозадачнось, то можно сделать подсчёт, скажем раз 100мс, а вывод на дисплей раз в 250мс. Очень короткий интервал опроса снизит чувствительность к низким частотам.
Как говорят в рекламе, "но это ещё не всё".
Ошибки дребезга
Для устрашения вас предположу, что измеряем частоту вращения двигателя от индуктивного датчика зажигания. То есть, грубо говоря, на высоковольтный провод намотан кусок кабеля и мы измеряем индукцию в нём. Это довольно распространённый метод, не правда ли? Что же здесь сложного может быть? Самая главная проблема — современные системы зажигания, они дают не один импульс, а сразу пачку.

Но даже обычная система зажигания даёт переходные процессы:

Старинные же кулачковые контактные вообще показывают замечательные картинки.
Как с этим бороться? Частота вращения не может вырасти мгновенно, не даст инерция. Кроме того, в начале статьи я предложил ограничить частоту сверху разумными рамками. Отсчёты, что происходят слишком часто можно просто игнорировать.
Другой вид помех — это пропадание отсчётов. Из-за той же инерции у вас не может измениться частота в два раза за одну миллисекунду. Понятно, что это зависит от того, что вы собственно измеряете. Частота биения крыльев комара может, вероятно и за миллисекунду упасть до нуля.
Статистическая обработка в данном случае становится уже достаточно сложной для маленькой функции обработки прерывания и я готов обсудить варианты в комментариях.
Особенности измерения скорости движения и скорости вращения.
При измерении скорости вращения бензинового двигателя надо обязательно учесть величину К, которая совсем не очевидна. Например, вы намотали провод на кабель свечи и ожидаете, что там будет одна искра на один оборот. Это совсем не так. Во-первых, у 4-тактного двигателя вспышка происходит один раз на два оборота, у 2-тактного один раз на оборот коленвала. Во-вторых, для упрощения системы зажигания коммутатор подаёт искру на неработающие в данный момент цилиндры, типа на выпуске. Для получения правильного К надо почитать документацию на двигатель или подсмотреть показания эталонного тахометра.
При измерении скорости движения частота обновления дисплея не имеет большого значения, особенно, если вы рисуете цифры, а не двигаете стрелку. Даже обновление информации раз в секунду не вызовет отторжения. С оборотами двигателя всё наоборот, индикатор должен откликаться гораздо быстрее на изменение оборотов.
Вывод информации
Типичная обида начинающего разработчика автомобильной и мотоциклетной электроники "стрелки дёргаются, цифры нечитабельны" лечится простым способом — надо обманывать клиента. Вы что думаете, автомобильный тахометр всегда показывает вам правду? Конечно же нет! Хотя вам этот обман нравится и вы хотите, чтобы ваш прибор дурил голову так же.
Стрелки
Если включить зажигание на новом модном автомобиле или мотоцикле, стрелки приборов сделают красивый вжух до максимума и медленнее опадут до нуля. Вот! Вот это нам и надо сделать. Надо, чтобы при показе максимальной величины стрелка не метнулась к ней мгновенно и не упала как акции лохотрона в ноль.
Итак, нам надо учитывать максимальную скорость стрелки на увеличение и максимальную на уменьшение показаний. Совсем хорошо сделать эти скорости нелинейными, чтобы стрелка сначала двигалась быстрее, а потом чуть помедленнее приближалась к заданному значению.
Вот пример с нелинейным выводом показаний:
Вы можете поиграть с коэффициентами. Этот же принцип используется при выводе громкости сигнала, например, у любого аналогового индикатора: стрелки, полоски, яркость, цвет, размер итп. Приведённый пример самый простой, но и не самый красивый. Предлагайте ваши варианты в комментариях.
Цифры
С цифрами всё намного сложнее. Быстрые изменения показаний приводят к тому, что несколько порядков сливаются в мутное пятно. Для скорости, как и писал выше, можно задать интервал раз в секунду и глаз успеет прочитать три цифры.
В мототехнике не зря делают аналоговые индикаторы оборотов, точные цифры не нужны, важна относительная близость к оборотам максимального крутящего момента, к максимальным вообще и холостые.
Я предлагаю менять частоту вывода информации на дисплей в зависимости от степени изменения величины. Если обороты меняются, скажем, на 5% от последнего подсчёта, а не показа — можно затупить и показывать раз в 300-500мс. Если на 20%, то показывать раз в 100мс.
Можно огрубить шкалу и показывать только две значащие цифры
С учётом мототематики, можно довольно точно показывать обороты холостого хода как описано чуть выше и огрублять вывод на оборотах от двух холостых. На высоких оборотах для гонщиков важнее делать блинкеры типа "передачу вниз", "передачу вверх" и "ты спалишь движок". То есть держать двигатель около максимального крутящего момента и не дать ему крутиться выше максимальных разрешённых оборотов. Блинкеры замечательно делаются с помощью SmartDelay когда можно унаследовать от этого класса свой с заданной ногой контроллера и частотой мигания, там есть методы для переопределения и они вызываются раз в заданное время.

Схема подключения тахометра ВАЗ-2106
- пластикового цилиндрического корпуса со стеклодержателем;
- шкалы, разделённой на зоны безопасного и опасных режимов;
- лампы подсветки;
- миллиамперметра, на валу которого закреплена стрелка;
- электронной печатной платы.

Принцип его работы построен на измерении количества импульсов электрического тока в первичной (низковольтной) цепи системы зажигания автомобиля. В двигателе ВАЗ 2106 за один оборот вала трамблёра, соответствующий двум вращениям коленчатого вала, контакты в прерывателе замыкаются и размыкаются ровно четыре раза. Эти импульсы снимаются прибором с конечного вывода первичной обмотки катушки зажигания. Проходя через детали электронной платы, их форма из синусоидальной преобразуется в прямоугольную, имеющую постоянную амплитуду. С платы ток поступает на обмотку миллиамперметра, где в зависимости от частоты следования импульсов, увеличивается, или уменьшается. Стрелка прибора реагирует именно на эти изменения. Чем больше сила тока, тем больше стрелка отклоняется право и наоборот.
Подключение тахометра в карбюраторных ВАЗ 2106

В бесконтактной системе зажигания тахометр подключается не к катушке, а к коммутатору
Подключение тахометра в инжекторных ВАЗ
- Кабель белого цвета необходимо для соединения подсветки.
- Провод красного цвета подключается к замку зажигания, для этого используется предохранитель, этот кабель подает питание при активированном зажигании.
- Кабель белого цвета с черной поломкой необходим для подключения к кузову авто.
- Коричневый проводок подключается к выводу К+ на катушке.
- Проводок черного цвета подключается к реле индикатора зарядного тока. Последний, в свою очередь, установлен справа в моторном отсеке.
- Серо-черный кабель необходим для соединения с регулятором давления моторной жидкости, установленным слева от мотора.

Схема подключения тахометра ВАЗ-2108 и 2109
Сразу отметим, что здесь не играет особой роли система подачи топлива – инжектор или карбюратор. Как известно, в настоящее время наиболее распространенными являются автомобили со следующими типами двигателя: бензиновые или дизельные. В зависимости от этого и подбирается тахометр, если, конечно, он не идет в стоковой версии. Все дело в том, что на бензиновых двигателях тахометр считывает данные с катушки зажигания, вернее, возникающие здесь импульсы. Однако конструкция дизельных силовых установок не предусматривает этого узла. Соответственно, здесь тахометр считывает импульсы не с катушки зажигания (за неимением таковой), а генератора.

Схема подключения тахометра ВАЗ-2110

- тахометр ВАЗ;
- маршрутный компьютер;
- контроллер ЭСУД;
- датчик положения коленвала;
- модуль зажигания.
Тахометр ВАЗ 2110 – с четырьмя выводами: если он стоит на машине с впрыском, то подключен не к зажиганию (вх. 2), а к контроллеру ЭСУД предусмотренным для этого дополнительным выводом (вх. 1) – и в этом случае считывает количество импульсов оборотов непосредственно с контроллера. Он получает сигнал о положении вала.
Принципиальная схема электроники тахометра
Подключение современных электронных тахометров:
Тахометр, предназначенный для 4-х цилиндрового двигателя, поставить на другой нельзя, потому что показания будут ложными. Поэтому подбирайте тахометр в соответствии с маркой автомобиля и количеством цилиндров.
Про датчик тахометра ДПКВ
У тахометра есть датчик (датчик положения коленчатого вала – ДПКВ). Это устройство служит не только для того, чтобы считать обороты коленвала, но и определять его положение в определённый момент, что необходимо электронному блоку управления для обеспечения правильной работы силового агрегата. При прохождении рядом с сердечником датчика металлического предмета в нём образуется электрический импульс, который передаётся на электронный блок управления двигателем. Роль такого предмета в силовом агрегате авто играет зубчатая шестерня коленвала.

Почему прыгает тахометр ВАЗ
Очень часто случается такое, что стрелка начинает дергаться. Если автомобиль инжекторный, то поиск неисправности заключается в том, чтобы подключить диагностический сканер и проверить системы двигателя. Скачки стрелки ТХ-193 в большинстве случаев также являются симптомом неисправностей, связанных с его электрической цепью. Причинами такого поведения прибора могут быть:
Решается подобная проблема путём зачистки контактов, замены крышки распределителя зажигания, бегунка, опорного подшипника, восстановления целостности изоляции питающего провода прибора, замены датчика коленвала.
Ещё скачок может быть обусловлен неработоспособностью конденсатора, расположенном в нижней части прерывателя. Конденсатор может быть пробитым либо его контакт очень слабый.

Если не работает тахометр на ВАЗ
Обычно, отсутствие реакции стрелки связано с нарушением контакта в разъёмах основных проводов его подключения, или же повреждением проводки цепи. Первым делом следует:

НАЖМИТЕ ТУТ И ОТКРОЙТЕ КОММЕНТАРИИ
ВАЗ 2108 ВЫСОКАЯ ПАНЕЛЬ КАРБЮРАТОР ПРИ ВКЛЮЧЕНИИ ЗАЖЫГАНИЯ СТРЕЛКА ТАХОМЕТРА ПАДАЕТ ЗА 8 ТЫСЯЧ

Тахометр является устройством, которое активно используется на бензиновых и дизельных автомобилях. Данный прибор служит для измерения скорости вращения (оборотов) коленчатого вала или генератора. Большинство современных транспортных средств оснащаются штатным тахометром прямо с завода.
Потребность самостоятельно установить тахометр на дизельном двигателе может возникнуть по разным причинам. Следует отметить, что схема подключения тахометра на дизеле несколько отличается от аналогичного решения для бензиновых ДВС. В процессе выбора тахометра для дизеля необходимо учитывать данную особенность, так как тахометр для бензиновых двигателей на дизельный мотор не подойдет.
Рекомендуем также прочитать статью о том, как самому заменить свечи накаливания дизельного двигателя. Из этой статьи вы узнаете об особенностях проведения процедуры замены калильных свечей.
Откуда берет сигнал тахометр на дизельный двигатель

Сегодня для дизельных двигателей в продаже представлены электронные, цифровые и аналоговые тахометры, схема подключения которых предполагает ряд особенностей. Дело в том, что местом подключения тахометра для дизеля в подавляющем большинстве случаев выступает генератор.
Для реализации подключения к генератору необходимо иметь сам тахометр, провод с изоляцией и сопроводительную инструкцию по установке и эксплуатации автомобильного тахометра.
Подключение устройства
В основе принципа работы электронного тахометра лежит считывание электрических импульсов. В бензиновых агрегатах считываются импульсы, которые в определенном количестве подаются на катушку зажигания. Что касается дизельного мотора, то считывание осуществляется со специальной клеммы, которая находится в корпусе генератора.
Также в отдельных источниках рекомендуется дополнительно реализовать замыкание контакта, который идет от маслонасоса. Данную операцию выполняют для того, чтобы тахометр после установки выдавал правильные показания, а также для исключения других проблем. Отмечено, что в противном случае после выхода мотора на определенную частоту вращения коленвала на панели приборов возможно ложное загорание сигнальной лампы, указывающей на критически низкое давление моторного масла в системе смазки двигателя.
Рекомендуем также прочитать статью о КПД дизельного двигателя. Из этой статьи вы узнаете о том, почему коэффициент полезного действия дизельного двигателя больше сравнительно с бензиновыми агрегатами.
Также стоит учесть, что прямое подключение провода к тахометру приведет к неправильным значениям. Дополнительно потребуется плата-делитель, которая сделает показания оборотов корректными.


Почему дизельный двигатель не нужно крутить так, как бензиновый мотор. Особенности и отличия дизельных ДВС в сравнении с бензиновыми. Оптимальные обороты.

Обороты и мотресурс двигателя. Недостатки езды на низких и высоких оборотах. На каком количестве оборотов мотора ездить лучше всего. Советы и рекомендации.

Принцип работы и устройство автомобильного генератора. Составные элементы генератора переменного тока в автомобиле: ротор, статор, обмотки, регулятор.

На холостом ходу "плавают" обороты: почему так происходит. Основные неисправности, связанные с холостыми оборотами на бензиновом и дизельном двигателе.

Настройка холостых оборотов на карбюраторном и инжекторном моторе. Особенности регулировки ХХ карбюратора, регулировка холостого хода на инжекторе.

Плавающие холостые обороты двигателя "на холодную". Основные неисправности, симптомы и выявление поломки. Неустойчивый холостой ход дизельного двигателя.
Читайте также: