
Тойота у которой поворачиваются задние колеса
Добавил пользователь Alex Обновлено: 19.09.2024
У кого 4WS у тех и рулят.
Система 4WS - это система, обеспечивающая маневрирование автомобиля, путем поворота четырёх колёс, а не двух, как на большинстве обычных автомобилей. При движении с обычной скоростью эта система обеспечивает одновременный поворот передних и задних колёс в одном направлении, чем обеспечивается улучшение устойчивости автомобиля на дороге, причём задние колёса поворачиваются на гораздо меньший угол, нежели передние. При движении с маленькой скоростью ( примерно до 10 км/ч ), например на стоянке, передние и задние колёса поворачиваются в противоположные стороны, тем самым уменьшая радиус поворота и повышая " вёрткость машины "
Существуют различные разновидности таких систем. На некоторых передние и задние колёса на любой скорости поворачиваются в одну сторону. На других, при движении с малой скоростью, колёса поворачиваются в разные стороны, а на большей скорости - в одну. А есть такие, у которых между режимами малой скорости и большой, при которой колеса поворачиваются в одну сторону, существует скоростной интервал, на котором данная система не функционирует.
В разговорах с людьми, эксплуатирующими автомобили с системами 4WS, или аналогичными, можно услышать много хороших откликов об управляемости таких машин и о том, что повороты можно проходить на высокой скорости без скольжения и заносов. Это действительно так, но существует недостаток подвесок с такими системами, обусловленный плохим качеством наших дорог. Дело в том, что у таких подвесок " шариков " больше чем у обычных подвесок, и поэтому ремонт ходовой части обходится дороже.
Список автомобилей, которые оснащались (ются) системой 4WS. не все конечно т. к. их очень много особенно для внутреннего Японского рынка.
Honda Prelude, Honda Accord, Toyota Celica, Toyota Camry, Mazda Xedos, Mitsubishi Sigma, Mitsubishi GTO, Mitsubishi Galant, GMC Sierra, Nissan Skyline, Nissan Laurel,
На БТР передние четыре, на Ураганах (МАЗ) - передние два и задние два (из 8), на комбайнах и карах - задние, была самоделка из Армении там стояли два передних моста от УАЗ и все колёса рулили. Есть машины, где задние колёса подруливают. Какие то разработки были по парковке боком.
Идея поворачивать с помощью все четырех колес, бродит в светлых умах инженеров еще начиная с 20-х годов прошлого века. Полноуправляемое шасси дает много преимуществ: автомобиль получается маневренным на низких скоростях и устойчивым на высоких. О трудностях и успехах в создании автомобилей с таким шасси я расскажу сегодня.
Первым автомобилем с поворотными задними колесами, принято считать американский грузовик Jeffery Quad, так же известный как Nash Quad . Созданный талантливым инженером Чарльзом Нэшем в 1913 году, он быстро завоевал популярность. Полноприводный, маневренный и с хорошей грузоподъемностью в 2 тонны, он как нельзя лучше подходил для службы в армии. Многие страны буквально выстраивались в очередь за этим грузовиком. Россия в 1915 году закупила около 30 автомобилей из которых в последствии были построены броневики.
В 1936 году Mercedes-Benz выпускает модель 170VL , в которой с помощью системы механических тяг, задние колеса могли поворачиваться уменьшая тем самым радиус поворота до 5 метров. Полноприводный 170VL, предназначался для нужд немецкой армии и был выпущен в количестве 500 штук.
Более современные механически-электронные системы начались разрабатываться только с 70-х, когда в 1973 году Министерство обороны США объявило о своем проекте ESV (Experimental Safety Vehicle), в рамках которого происходили поисковые работы на тему безопасного автомобиля будущего десятилетия. К программе подключились, множество автопроизводителей из 7 стран, в том числе и Япония.
Во время экспериментов, инженеры Honda определили, что выгоднее всего для обеспечения лучшей маневренности на малых скоростях поворачивать задние колеса в противоположную от передних сторону. А для большей устойчивости и безопасности на скоростях более 40 км/ч в ту же, что и передние. В 1981 году был создан первый прототип, который представлял собой две передние части Honda Accord соединенные в один автомобиль. Так была запатентована система управляемого шасси, которое получило название 4WS.
Впервые такая система, дебютировала 7 лет спустя, на Honda Prelude третьего поколения. Она была полностью механической. Оценив преимущества такого шасси, другие японские производители начинают также активно работать над аналогичными решениями. Так Mazda в 1990 году представляют свою модель MX-6 GT , в которой в отличие от Хонды задние колеса поворачивались с помощью гидравлики. Впоследствии многие японские производители стали предлагать в качестве опции полноуправлемое шасси и в 90-х годах казалось, что система 4WS пришла в серьез и надолго, но почему же ее не встретить на современных машинах?
А тут все довольно просто, несмотря на высокую надежность этих систем на японских машинах, потребители не желали переплачивать за 4WS и не видели большого преимущества в ней. И логику простых водителей можно понять, при движении на стандартных скоростях выгода от нее не так очевидна.
Но не стоит переживать, полноуправляемое шасси никуда не делось, а переместилось в более дорогой сегмент, где служит на благо управляемости таким спорткарам как Lamborghini Aventador и Porsche 911 GT3.
Друзья, если вам понравилась статья, ставьте лайк 👍 и подписывайтесь на канал, благодарю за поддержку)

Ставим авто на стойки (идеальный вариант), либо, перед поднимаем домкратами либо на стойки, а заднюю часть авто на кирпичи- все это делается для удобства доступа к системе 4WS и тестировании ее в движении в воздухе. ОБЯЗАТЕЛЬНО НУЖНО УБЕДИТЬСЯ, ЧТО АВТО НЕПОДВИЖНО

В этом месте стоит болт-заглушка, он выполняет функцию блокировки задней рейки в среднем положении (задние колеса блокированы в центральном положении) при СНЯТОМ карданчике, соединяющем переднюю и заднюю рейки. При его выкручивании, если заглянуть в отверстие, в глубине можно увидеть отверстие в штоке, который двигается либо вправо, либо влево в зависимости в какую сторону крутить рулевое колесо. Следовательно блокировочный болт с острием на конце центрит заднюю рейку (удобство при регулировке развала-схождения задних колес и последующей регулировки передних в соотношении к задним) Обращаю внимание, что при соединенных рейках между собой карданчиком, болт ни в коей мере нельзя вкручивать, во избежание поломки механизма 4WS (разве что временно, во время регулировки развала для центрежа), вместо болта ставим короткий болтик, либо заглушку, во избежание попадания влаги и пыли в заднюю рейку.

Вид сзади со снятым защитным кожухом и открученной частью системы ws с моторами. Видно Квадратное отверстие, про которое будет речь ниже.


Снятый механизм с открученным и снятым корпусом одного из двигателей. Если рассмотреть двигатели, можно заметить, что они разные. 1-с круглым корпусом крутит шток входящий в основной механизм WS задней рейки против часовой стрелки (крайнее положение прокручивания ставит механизм задней рейки так, что колеса при повороте развернуты в разные стороны в соотношении передних и задних. 2-й соответственно наоборот.



Ни для кого не станет новостью то, что машины с задними подруливающими колесами впервые возникли в Японии в 1985 году на модели Nissan R31 Skyline, транспортном средстве, которое является олицетворением инноваций.



1. BMW 850 CSi
Из-за своей системы Aktive Hinterachs-Kinematik (AHK) авто довольно часто трудится неверно, и чаще всего это требует огромных затрат на исправление, так что автомобиль продается по не сильно высокой цене. В движение модель приводится 5,6-литровым V12 с отдачей 375 л.с.

2. Honda Prelude
Honda Prelude являлась машиной, которая привлекла общественное внимание к рулевому управлению. Его система могла управлять задними колесами так же, как передние, на 1,5 градуса и до рулевого входа 246 градусов. При помощи блокировки задние колеса могли двигаться в противоположном направлении на 5,33 градуса, что позволяло Honda иметь компактный радиус разворота - всего 10 метров. Но ценник сложного рулевого механизма также не нравился страховщикам.

3. Xedos 9
Торговый бренд, который принадлежит Mazda, не имел особого успеха в Великобритании с моделью Xedos 6, и крупный Xedos 9 так и не стала популярной. Вероятно, причиной стал тот факт, что британская версия лишилась активной системы рулевого управления, доступной в японских вариантах.

4. Lamborghini Urus
Lamborghini был весьма успешен с обновленным полноприводным Aventador S, с возможностью отключения одной из осей. Шасси суперкара потом передали внедорожнику Urus. Это был ключевой элемент в разработке высокопроизводительного внедорожника, который не испортил репутацию второй самой известной итальянской компании спортивных машин.

5. Mitsubishi 3000 GT
3000 GT был награжден почти таким же богатым оснащением, как DeLorean Дока Брауна: активная аэродинамическая система, полный привод, способные подруливать задние колёса, адаптивная подвеска и два турбонагнетателя. Тем не менее, британские водители покупали именно эту модель, вместо BMW или Porsche.

6. Ford F-150 Platinum ZF
Представьте себе длину транспортного средство равную 5,8 метра, а круг разворота - примерно 14 метров, одной мысли о многоэтажной парковке, хватит, чтобы от душа ушла в пятки. Именно поэтому последний Ford F-150 был награжден системой рулевого управления задними колесами ZF. С тех пор Ford подал заявку на патент на такую систему на нынешнем F-150.

7. Porsche 911 GT3
Первая машина бренда, которая получила активную заднюю систему рулевого управления это 918 Spyder. Однако наиболее бюджетным был 911 GT3. Инженеры хорошо поработали над ним.

8. Ferrari F12TDF

9. Renault Megane RS
В хэтчбеке это может показаться ненужным, однако инженеры Renault Sport использовали в своих интересах рулевое управление с четырьмя колесами последней генерации 4Control, применяя его регулируемым в зависимости от условий. Renault также говорит, что угол поворота рулевого колеса сокращается на 40% в сравнении с Mégane без системы.

10. Nissan 300 ZX
В 1990 году Nissan хотела убедить британских автолюбителей в том, что компания, наиболее известная по модели Micra, могла бы работать совместно с Porsche, так что продажи 300 ZX вскоре замедлились до незначительного числа. Хотя модель была весьма интересная, к примеру возможность отключить аппаратное управление полным приводом High Capacity Active Steering (HICAS).

Когда японские машины считались самыми-самыми продвинутыми, легенды доносили о том, что в Стране восходящего солнца есть машины, у которых поворачиваются все четыре колеса. Потом в суете обновок те времена как-то забылись. Бурное начало девяностых годов прошло, и в серийном производстве остались только самые нужные из технических решений той поры. Но сейчас интерес к полноуправляемым шасси снова растет, правда, уже на ином техническом уровне, без дополнительных рулевых валов и с заметно упростившейся задней подвеской.
И ладно бы только на Porsche 911 GT3 или Lamborghini Aventador — но ведь на обычном Renault Espace тоже внедряют поворачивающиеся задние колеса. В чем смысл такого технического решения, и ради чего шли на такие сложности производители? И почему о технологии забыли до недавнего времени?
Зачем нужна управляемость
Нет, речь вовсе не о школьном предмете — я про геометрию шасси. Это набор параметров, описывающих изменения в положении элементов шасси при изменении нагрузки. Суть фокуса в том, что при прохождении поворотов машина наклоняется, да и дорога имеет свой профиль. При правильном расчете параметров геометрии шасси покрышки всегда имеют оптимальный для данных условий контакт с дорогой.
Речь здесь не о максимальной прижимной силе, а о соотношении коэффициента сцепления колес передней и задней оси, правого и левого колес, и о способности колеса в каждый момент воспринимать нагрузку по трем направлениям.
Задача повысить площадь контакта колес с дорогой не так проста, как кажется.
А можно задать перемещение с помощью усложненной подвески — например, многорычажной, которая позволяет настраивать геометрию движения колеса в очень широких пределах и сохранять эти параметры при износе элементов длительное время.
Если вы не гонщик, это не означает, что управляемость для вас не важна. Просто в вашем случае этот термин означает совсем иной набор предпочтительных параметров, нежели идеальная точность и быстрота реакций. Собственно, активная безопасность машины во многом зависит от ее управляемости, и потому над этими параметрами конструкторы автомобилей работают много и продуктивно. А какое отношение это имеет к геометрии шасси?
Как машина поворачивает
Казалось бы, чего проще: повернул передние колеса — и машина повернула. Но на практике все заметно сложнее. Для начала даже на стоящей машине повернутся не только передние колеса. Поскольку у передней подвески есть угол кастора, то передние колеса при повороте поднимутся, каждое на свою высоту. На сколько — зависит от ширины и твердости резины, геометрии подвески и так далее.
Машина в результате получит некоторый крен, в зависимости от высоты центра крена передней и задней подвесок и положения центра масс в этот момент. Задние колеса или даже неразрезной задний мост тоже повернутся — просто в силу того, что при любом изменении положения кузова колеса не просто ходят вверх-вниз, а тоже чуточку, но поворачивают.
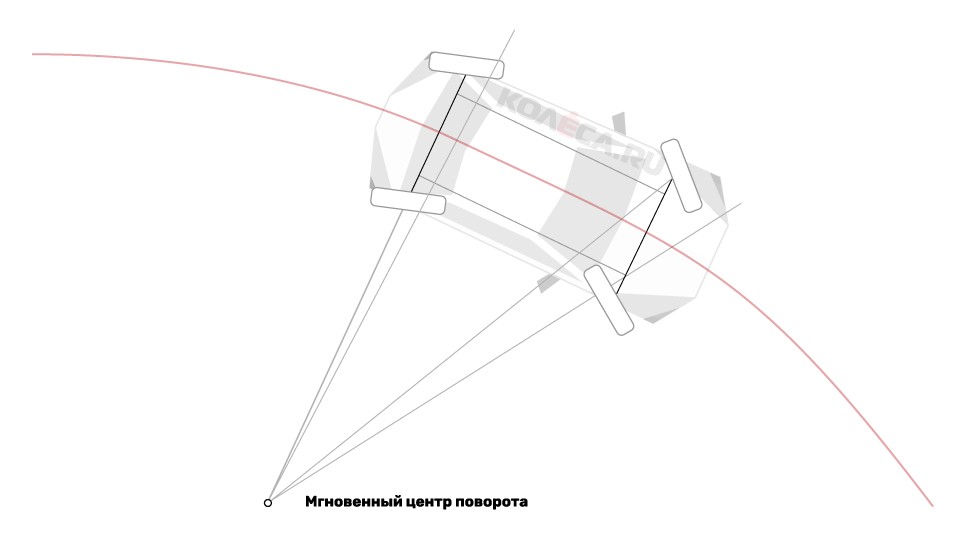
В динамике к этой куче параметров добавятся кренящий момент от центра масс машины и уводы резины. Среди всех параметров, которые необходимо рассчитать, для нас наибольшее значение будет иметь мгновенный центр поворота и радиусы поворота передней и задней осей и центра масс. Мгновенный центр поворота совсем не совпадает с геометрическим, который вычислен по правилу Аккермана – точкой, в которой находятся центры окружностей качения всех колес. Более того, в динамике такой точки просто не существует из-за скольжений. Но на рисунках для примера рассмотрена более простая ситуация, чтобы не наводить путаницы.
На первый взгляд, если доворачивать задние колеса в противоположную от передних сторону, то уменьшается радиус поворота машины. Это важно с точки зрения удобства эксплуатации и маневренности. Чем меньше радиус, тем удобнее. Но машины ездят не только на скоростях погрузчиков в торговом центре, так что приходится учитывать и другие факторы.
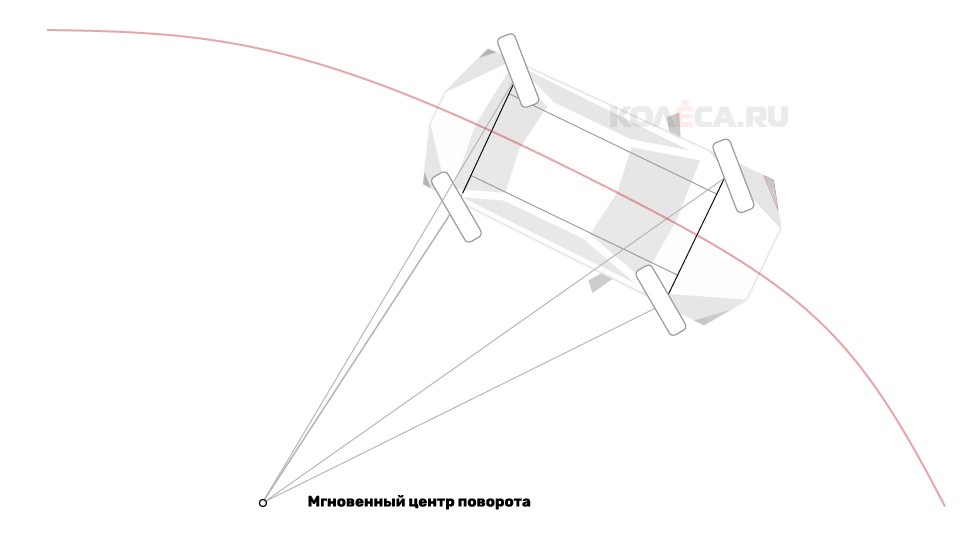
Но, кажется, того же можно добиться, просто повернув руль на меньший угол? Можно это сделать даже автоматически — благо, рулевые механизмы с переменным шагом сейчас не редкость. Но при повороте задних колес в сторону поворота еще и уменьшается угол увода задней оси, а значит, и склонность к избыточной поворачиваемости. Если совсем просто – машина становится более устойчивой к возникновению заноса. На высоких скоростях это крайне важно.
Схожий эффект можно было бы получить простым увеличением колесной базы. Но размеры машин ограничены — зато с помощью изменения угла поворота задних колес можно получить желаемое, не увеличивая габаритов. А для короткобазной машины это просто спасение: можно сохранить сочетание устойчивости на дороге, характерное для больших машин, не отказываясь от хорошей поворачиваемости.
Не только управлением
Для устойчивости на дороге заднее колесо в повороте должно поворачиваться в сторону поворота передних, а для лучшей маневренности – в противоположную. Если с маневренностью особых сложностей нет, то можно использовать для доворота колес особенности движения машины в повороте. Например, наличие крена. При сжатии подвеска будет доворачивать колесо, и мы получим желаемое.
Но тут есть две проблемы. Во-первых, подвеска таким же образом реагирует на изменение нагрузки, а хотелось бы, чтобы управляемость меньше зависела от нагрузки и больше от собственно крена и боковых усилий. Во-вторых, на заднеприводных машинах очень соблазнительно привязать поворот колес к вектору тяги.
Если усложнять подвеску, вводя рычаги, которые воздействуют на углы установки колес при определенной нагрузке, то мы получим многорычажную подвеску. Да, ту самую, которая появилась на Mercedes W201 и сейчас применяется на большинстве машин С-класса и выше. Причем не только на задней оси, но и на передней.
Именно многорычажная подвеска позволила получить тот же эффект, что и принудительный поворот задней оси, и отказаться от применения сложных систем принудительного поворота на четверть века. Система рычагов в такой подвеске задает сложную траекторию движения колеса в зависимости от продольной, поперечной и вертикальной нагрузок.
Можно довольно точно настроить геометрию шасси с учетом того, как машина будет вести себя при появлении значительных боковых сил, при разном соотношении вертикальной и поперечной нагрузок. Для заднеприводных машин это оказалось серьезным подспорьем в борьбе за лучшую управляемость с самого начала, а переднеприводные примерили подобные технологии чуть позже, с ростом массы, нагрузок и требований уже к их управляемости.
Первые полноуправляемые легковушки
Машины с двумя управляемыми осями создавали вовсе не для отличной управляемости. Такие машины вообще не ездили по шоссе на большой скорости, потому что это были вездеходы. Например, знаменитый Unimog – универсальное шасси повышенной проходимости имеет все четыре управляемых колеса. Разумеется, для того, чтобы лучше ехать по бездорожью и маневрировать в ограниченном пространстве.
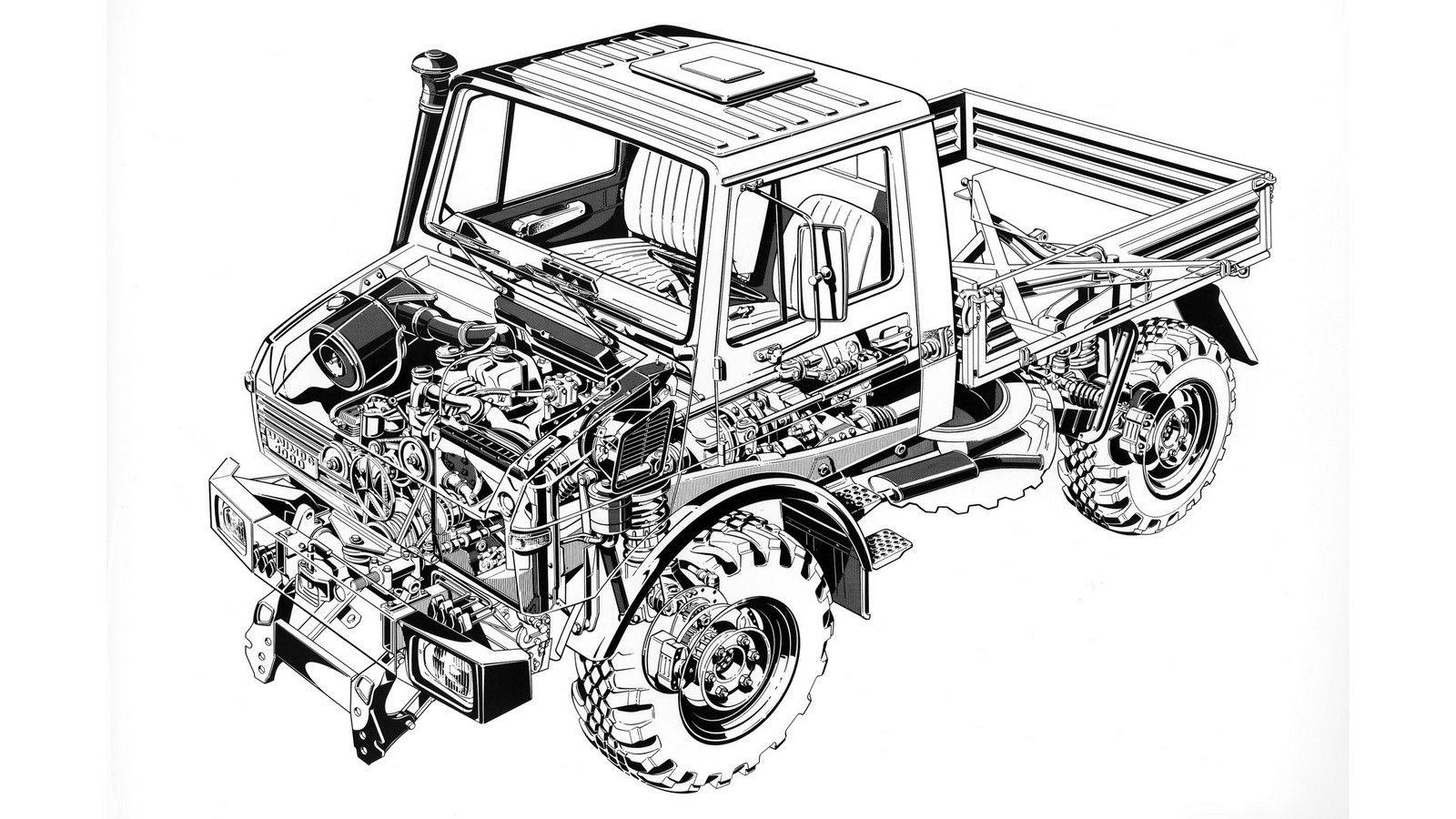
На фото: Mercedes-Benz Unimog U 1000
Японские машины начала 80-х годов по сложности конструкции недалеко от них ушли. На Honda Prelude 1987 года была задняя рулевая рейка и вал, связывающий ее с рулевым колесом, и система работала в зависимости от угла поворота колес. На малых углах поворота задние колеса поворачивались в ту же сторону, что и передние, а при больших — в противоположную. Даже в таком виде эффект оказался достаточным, чтобы подобную технологию внедрили и другие японские производители.
На фото: Honda Prelude 1987
Только на следующих поколениях привод задней рулевой рейки стал уже электрическим, а угол поворота зависел и от скорости, на которой совершался маневр. Впрочем, от валов и рейки избавиться не догадались. Конструкции оставались сложными, массивными, объемными и дорогими. Как итог — машины с ними не снискали особой популярности и продавались только на внутреннем японском рынке. Во всем остальном мире безоговорочное лидерство захватили многорычажные подвески.
Почему снова появляются полноуправляемые шасси
Самый очевидный ответ на этот вопрос — снижение цены на приводные механизмы и электронику управления и развитие систем устойчивости и безопасности. На новом технологическом уровне отказались от задних рулевых трапеций и реек. Многорычажные подвески обеспечивают уже достаточный угол доворота колес для реализации нужного эффекта. Осталось оснастить их вместо рычага, отвечающего за доворот колеса, активным электрическим или гидравлическим приводом.
Электроника куда точнее определяет, что происходит в данный момент с машиной, позволяет использовать большие углы доворота, и к тому же дешевле в настройке, чем сложная подвеска. И как дополнительный фактор – то самое улучшение поворачиваемости на малых скоростях. Можно довернуть колеса в противоположную сторону и улучшить маневренность машины на узких улочках.
Читайте также: