
Тахометр вентилятора принцип работы
Добавил пользователь Валентин П. Обновлено: 19.09.2024
Сделать таходатчик для кулера оказывается совсем простое дело и, к тому же, не требует спецовых деталей.
н-р: датчик холла (описываемый в одной из статей, про датчик оборотов в БП) найти в Киеве я не смог .
датчик, на самом деле, тут не датчик, а преобразователь сигнала с катушек кулера в прямоугольник, нужный для материнской платы.
на схеме показано: микросхема управляющая обмотками и, собсно, сам мод кулера -- транзистор с резюком.
транзистор -- любой n-p-n полярности, мощность чем меньше, особенно в маленьких кулерах хорошо SMD.
резистор -- аналогично по мощности, номинал примерно 2 кОм.
схема к.
Сделать таходатчик для кулера оказывается совсем простое дело и, к тому же, не требует спецовых деталей.
н-р: датчик холла (описываемый в одной из статей, про датчик оборотов в БП) найти в Киеве я не смог .
датчик, на самом деле, тут не датчик, а преобразователь сигнала с катушек кулера в прямоугольник, нужный для материнской платы.
на схеме показано: микросхема управляющая обмотками и, собсно, сам мод кулера -- транзистор с резюком.
транзистор -- любой n-p-n полярности, мощность чем меньше, особенно в маленьких кулерах хорошо SMD.
резистор -- аналогично по мощности, номинал примерно 2 кОм.

схема кулера могет быть и сложнее, с конденсатором и диодом, но роли это никакой не играет, подключаетесь
к любой обмотке кот. понравится. На выходе, если смотреть осцилографом, будет прямоугольник, как и на обычном кулере.
Если частоту прямоугольника умножить на 30, то получите частоту оборотов в мин.

У такого мода есть недостаток -- надо полностью разбирать кулер, снимать плату, а снять ее порой бывает не просто.
на фото видно мой мод 120ки, неизвестной фирмы AD от корпуса 3R System Air. детали впаял на места для других каких то деталей, так, как мне надо было по схеме.
все работает, вот только проверить толком не смог, т.к. материнка такие низкие обороты не видит (470-2300).
решение датчика оборотов было позаимствовано из CoolerMaster на 80мм 2ной шарикоподшипник
Подпишитесь на наш канал в Яндекс.Дзен или telegram-канал @overclockers_news - это удобные способы следить за новыми материалами на сайте. С картинками, расширенными описаниями и без рекламы.
Те самые вентиляторы, о которых рассказывал ранее, мне были нужны исключительно в качестве тахометров. Решение проблемы оказалось весьма простым - достаточно отключить обмотки двигателя и вместо любой из обмоток подключить резистор номиналом 1 кОм. Схема прекрасно работает с ТТЛ уровнями напряжений. Ниже несколько фото процесса переделки и тестовые испытания.

Сперва пришлось разломать один из вентиляторов, чтобы посмотреть топологию печатной платы. Далее в нужные точки схемы подпаял подтягивающий резистор

Затем снял крыльчатку и с помощью иглы оторвал провода обмоток двигателя

Теперь, зная топологию печатной платы, взял целый вентилятор и в интересующем участке пластмассового корпуса выпилил технологическое окно. Туда впаял SMD резистор


И залил места подключения термоклеем

Далее снял крыльчатку и скальпелем полностью удалил обмотки двигателя. Затем обратно установил крыльчатку.
Так как у меня внезапно появился тахометр из сломанного вентилятора, решил поэкспериментировать с измерением высоких скоростей вращения. Для этого достал гравер Зубр ЗГ-160ЭК и собрал небольшой испытательный стенд

В цанговый зажим гравера установил крыльчатку, на всякий случай предварительно удалив лопасти, дабы их не оторвало на высоких оборотах. Рядом разместил датчик

На таховыход подключил осциллограф и включил гравер. Вот такая картина наблюдается при минимальной частоте вращения. Частота следования импульсов 440 Гц, что соответствует частоте вращения 13200 об/мин

На один оборот крыльчатки приходятся 2 периода изменения напряжения: фронты и спады прямоугольных импульсов следуют через каждые 90 градусов поворота вала, т.е. абсолютно также как и в классической схеме вентилятора с таховыходом.
Осцилограмма на максимальной скорости вращения. Частота следования импульсов 1250 Гц, частота вращения 37500 об/мин. Кстати, у гравера, как выяснилось, скорость не постоянна, а "плавает" в некоторых пределах даже в отсутствии нагрузки

На этом, собственно, всё. Если кому нужен простой тахометр, можете переделать любой подобный вентилятор.
А если не секрет то как включить это всё когда транзистор стоит по минусу питания кулера. Если можно нарисуйте схемку:) И если не секрет то какие номиналы конденсатора и дросселя приблизительно нужны ато дома дросселей почти нет то завтра на рынке бы поискал.
_________________
Я не Сашок.
Я методом научного тыка кажись разобрался дорабатываю. Думаю через месяц будет статья на этом сайте, извиняйте раньше никак:)
_________________
Я не Сашок.
а на жёлтом проводе импульсы идут с кулера или с материнки?
вобщем суть, сделал регулятор оборотов кулеров, поставил штыревые разьёмы под кулеры но оба крайних штыря посадил на минус чтоб любой стороной втыкать можно было, а теперь думаю ничего плохого не случится от того что тахометр кулера будет посажен на минус?
Masta С жёлтого провода кулера сигнал поступает на материнку. А именно на нём появляется минус питания, минус на минус получается ничего не будет.
Доброго всем времени. Продолжу тему
Помогите решить задачку, пожалуйста. Хочу сделать аварийный останов БП компьютера, в случае если кулер снизит свои обороты до очень низких. Как-то остановился на второй сверху схемке, с таймером 555. Только там автор использует наводящийся сигнал с питающих проводов, а мне хотелось бы использовать тахометр кулера. Наверное нужно подать сигнал с тахометра на на базу транзистора? И изменить времязадающую цепь?
схема
_________________
CGI
Здравствуйте, помогите, плз.
Пытаюсь завести тахометр на пик16ф628, аппаратный шим работает правильно, а вот никак не могу заставить посчитать его обороты с кулера. Перепробовал разные схемы подключения провода таха- кажет 0 на лсд.
что может быть?
прога на пикейсик про, команда count, подключен тах на RA0.
Весьма универсальная штучка, которую я сделал по следам автора.
обороты можешь измерять различными способами.
от количества крыльчаток до импульса от тахометра веника.
_________________
Лечу лечить WWW ашу покалеченную технику.
Рассмотрим теперь более детально основные электронные узлы, но, для начала, отметим некоторые моменты в работе понижающих преобразователей напряжения в нашей схеме. Это самый простой вариант преобразователя, выходное напряжение которого содержит импульсные помехи и шумы и имеет некоторую нелинейность относительно сигнала управления. Но в данном случае (управление электродвигателями вентиляторов) высокая точность не нужна, главное, что мы можем управлять скоростью вращения, варьируя уровнем питающего напряжения. Другой способ, часто применяемый в простых схемах управления – это импульсное управление напряжением питания вентилятора (выключение и включение питания с большой частотой), однако этому способу присущ один недостаток – невозможность измерения скорости вращения с помощью встроенного тахометра.

Стоит заметить, что установленные дроссели, в зависимости от их качества, в процессе работы контроллера могут издавать звук высокой тональности. Это связано с вибрацией обмоток на рабочей частоте преобразователя 2.5 кГц. Этот звук слишком тихий, и при установке контроллера в корпус системного блока слышен не будет. Однако, с целью устранения этой проблемы, можно заменить их на дроссели с тороидальным сердечником. Они немного больше по размерам, но установка их на печатную плату затруднений не вызовет.
Разъем питания на плате контроллера (типа Molex 8981), к которому подключается один из отводов блока питания системного блока, необходимо хорошо закрепить, что бы не повредить печатные проводники при подключении/отключении платы в системном блоке.
Поддерживаемые типы вентиляторов
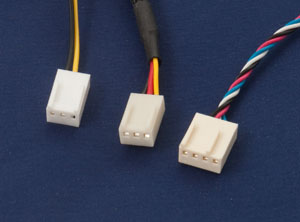
Контроллер может применяться для управления вентиляторами 3-х типов, в зависимости от их интерфейса подключения:
- Двухпроводные вентиляторы. В общем случае, они имеют 3-контактный разъем: вывод 1 – GND (общий), вывод 2 – +12 В, вывод 3 – свободный;
- Трехпроводные вентиляторы. Имеют такой же, 3-контактный разъем, но третий вывод используется, это выход встроенного в вентилятор тахометра, который может генерировать 1, 2 или 4 импульса на один оборот. Контроллер вентиляторов поддерживает работу со всеми видами тахометров;
- Четырехпроводные вентиляторы – это вентиляторы, разработанные по спецификации корпорации Intel. Они имеют 4-контактный разъем подключения: первые три вывода – как для вентиляторов с трехпроводным интерфейсом, четвертый вывод – для ШИМ управления скоростью вращения вентилятора. Следует обратить внимание, что разъем у таких вентиляторов специального типа, позволяющий подключать их как к 3-, так и к 4-контактным разъемам.
Если вентилятор сконфигурирован как 4-выводный, т.е подключен к разъемам 1A, 1B, 2A, 2B (конфигурируется в программе), то микроконтроллер удерживает напряжение питания вентилятора постоянным на уровне 12 В и управляет скоростью вентилятора ШИМ сигналом. Этот ШИМ сигнал доступнее на выходах микроконтроллера 12 и 13 и, таким образом, возможно управление четырьмя такими вентиляторами. Конструкция разъемов позволяет подключать в них 2- и 3-выводные вентиляторы, которые будут работать в нормальном режиме, т.е. с управлением уровнем напряжения питания.
Выводы тахометров вентиляторов подключены непосредственно к микроконтроллеру (порты микроконтроллера RB0-RB7), который измеряет скорость вращения, и на основе этих измерений осуществляет управление, а также сообщает скорость вращения по интерфейсу USB в программу на ПК. Заметьте, что выход тахометра – это выход с открытым коллектором, поэтому в портах микроконтроллера задействуются внутренние подтягивающие резисторы.
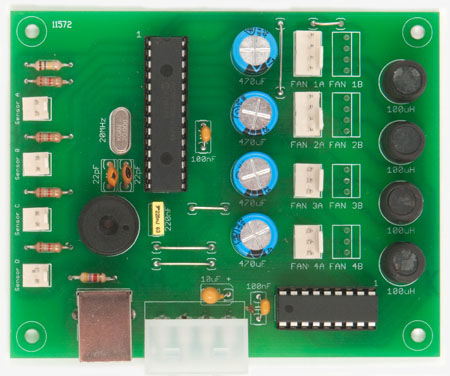 |
| Внешний вид платы контроллера с установленными компонентами |
Датчики температуры подключаются к плате контроллера с помощью 2-контактных разъемов. Схема распайки кабеля показана на рисунке ниже. Третий вывод датчика используется для введения температурной компенсации, и в нашем случае не используется.
Приборы для измерения частоты вращения вала (угловой скорости) называются тахометрами. Тахометры, снабженные регистрирующим (записывающим) устройством, - называются тахографами. Приборы суммирующие число оборотов вала - называются счетчиками.

В зависимости от места установки тахометра и способа применения тахометры подразделяют на стационарные, дистанционные и ручные. По принципу действия, различают механические (центробежные), магнитные, магнитно-индукционные, электрические и электронные тахометры.
Механические тахометры
Принцип действия механических тахометров основан на использовании центробежных сил, пропорциональных квадрату угловой скорости, действующих на центробежные расходящиеся грузы (наклонное кольцо), находящиеся на валу и вращающиеся вместе с ним вокруг оси, (рис. 1, а). Чувствительным элементом является кольцо 1 на оси 2, проходящей через приводной валик 3. Кольцо нагружено спиральной пружиной 4 и связано тягой 5 с подвижной муфтой 6. При вращении валика кольцо стремится занять положение, перпендикулярное к оси вращения. Муфта через промежуточное кольцо 9 и зубчатую рейку 7 входит в зацепление с шестерней 10, на оси которой закреплена стрелка 8, движущаяся вдоль шкалы прибора (градуирована в об/мин.). Тахометр закреплен неподвижно, а вал 3 приводится во вращение через передачу от вала двигателя.

При установившемся режиме центробежная сила, действующая на вращающееся кольцо 1, уравновешивается силой действия спиральной пружины, и стрелка тахометра неподвижна. При изменении частоты вращения вала равновесие сил нарушается, вызывая разворот кольца относительно оси 2 на угол α и соответствующий разворот стрелки 8 прибора. Механические центробежные измерительные приборы обладают нелинейной статической характеристикой, поэтому их шкала неравномерная.
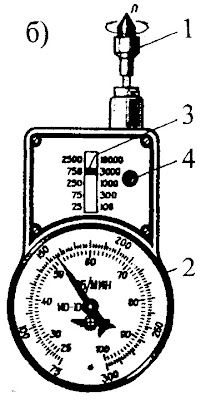
Периодический контроль частоты вращения и проверку стационарных тахометров производят механическим центробежным ручным тахометром (рис. 1, б), прижимая наконечник 1 к торцу вращающегося вала. В корпус 2 встроен редуктор с переключающим устройством, позволяющий менять передаточное отношение от наконечника 1 к чувствительному элементу для измерения в пяти диапазонах частоты вращения от 25 до 10000 об/мин. Переключают редуктор и устанавливают указатель 3 путем перемещения вдоль оси наконечника приводного вала при нажатой кнопке 4. В зависимости от установленного диапазона частоты вращения показания прибора определяют по одной из двух шкал.
К преимуществам механических тахометров относится высокая точность показаний, а к недостаткам - невозможность дистанционного отсчета.
Магнитоиндукционные тахометры
Магнитоиндукционный тахометр имеет равномерную шкалу. В тахометре (рис. 2.) вращение от приводного вала 1 через конические шестерни и вал 2 передается ротору с постоянными магнитами 3, между которыми на оси 10 находится алюминиевый диск 4.

Под действием вращающегося поля магнитов в диске индуцируется электрический ток, создающий свое магнитное поле. Сила взаимодействия магнитных полей уравновешивается силой действия волосковой пружины 5, один конец которой закреплен на оси 10, а другой - в корпусе прибора.
Пропорционально частоте вращения приводного вала 1 изменяются действующие силы, разворот диска 4, оси 10 и жестко связанной с ней стрелки 7 вдоль шкалы 8.
В прибор вмонтирован магнитоиндукционный успокоитель, состоящий из алюминиевого диска 9, закрепленного на валу 10, и неподвижной системы с постоянными магнитами 6. При движении в диске 9 индуцируется ток и создается магнитное поле, взаимодействующее с полем постоянных магнитов. А так как сила взаимодействия этих полей направлена в сторону, противоположную движению диска, то происходит торможение колебаний стрелки прибора.
Дистанционные магнитоиндукционные тахометры
Дистанционное измерение частоты вращения основано на принципе электрической дистанционной передачи вращения вала двигателя валу магнитно-индукционного измерительного узла измерителя и преобразования частоты вращения вала в угловые перемещения стрелки измерителя.

Тахометр работает следующим образом (рис. 3): в обмотке статора 11 датчика при вращении ротора 15 возбуждается трехфазовый ток с частотой, пропорциональной частоте вращения вала двигателя. Ток по трем проводам приводится к обмотке статора 12 синхронного серводвигателя.
Частота вращения магнитного поля статора измерителя пропорциональна частоте токов в обмотках фазы. Ротор двигателя измерителя вращается с частотой, синхронной вращению магнитного поля статора. На конце вала ротора двигателя укреплен магнитный узел 2 с шестью парами постоянных магнитов, между полюсами которых расположен чувствительный элемент 8. При вращении магнитного узла в чувствительном элементе индуцируются вихревые токи. В результате взаимодействия вихревых токов с магнитным полем магнитного узла создается вращающий момент чувствительного элемента. Вращающему моменту чувствительного элемента противодействует спиральная пружина 7, - один конец которой укреплен на оси чувствительного элемента, другой - неподвижен. Так как момент спиральной пружины пропорционален углу ее закручивания, то угол поворота чувствительного элемента пропорционален частоте вращения магнитного узла, и соответствует частоте вращения вала двигателя. На другом конце оси чувствительного элемента укреплена стрелка 5, показывающая по равномерной шкале 4 измерителя частоту вращения вала двигателя.
Для повышения устойчивости стрелки и улучшения отсчета показаний прибора применено демпфирование подвижной системы измерителя. При движении подвижной системы магнитный поток магнита 6 наводит в алюминиевом диске 3 вихревые токи, которые взаимодействуют с магнитным полем магнитов, и в подвижной системе возникает тормозящий момент. Ротор состоит из двух постоянных магнитов 13 и трех гистерезисных дисков 14, соединенных вместе. Взаимодействие ротора с магнитным полем статора - определяется взаимодействием магнитных полей постоянных магнитов статора и гистерезисных дисков.
Электрические тахометры
Электрические тахометры служат для дистанционного контроля направления и частоты вращения валов в диапазоне до 1500 об/мин. Датчиками в них служат тахогенераторы - миниатюрные генераторы переменного или постоянного тока, вырабатывающие напряжение, пропорциональное частоте вращения вала. Указателями являются магнитоэлектрические вольтметры со шкалой, градуированной в единицах частоты вращения.

В тахометре (рис. 4, а) тахогенератор 3 постоянного тока, приводимый во вращение от вала через цепной привод 2, является датчиком частоты вращения вала 1. К нему может быть подключено до восьми указателей - вольтметров 4 постоянного тока, размещенных по судну. Передаточное отношение от вала 1 к датчику определяется соотношением числа зубьев звездочек цепного привода и должно быть таким, чтобы номинальные частоты вращения вала и якоря датчика совпадали. Если при номинальной частоте вращения вала напряжение, вырабатываемое датчиком, не равно (30±0,1) В, то необходимо корректировать положение магнитного шунта. При правом и левом вращении якоря с номинальной частотой разность напряжений не должна превышать 0,1 В. В противном случае, необходимо корректировать нейтральное положение траверсы щеткодержателей.
В электрическом генераторе переменного тока 5 (рис. 4, б), ротором является постоянный магнит 7, установленный неподвижно на валу, а статором - стальные неподвижные полосы 6. Тахогенераторы постоянного тока вместо обмоток возбуждения имеют постоянные магниты. В результате большого количества ламелей коллектора и особых форм вырезов канавок вырабатывается постоянное напряжение с небольшими пульсациями, которое пропорционально частоте вращения. Преимущество датчиков постоянного тока - получение поляризованного напряжения, т. е. одновременно определяется и направление вращения; недостаток - сбои в работе коллектора. Передача от вала должна быть без скольжения (шестеренчатая, цепная). В тахогенераторах переменного тока это возможно только при наличии двух обмоток со сдвигом фаз 90°. Переменное напряжение должно быть выпрямлено в мостиковой схеме. Разность напряжений обоих гальванически разделенных контуров измеряется прибором с двумя поворотными катушками. Напряжение на выводах тахогенератора зависит от количества подключенных показывающих приборов. Поэтому в корпусе тахогенератора устанавливается нагрузочный резистор, который можно включать или выключать. Имеется также резистор для поднастройки показаний.
Счетчики оборотов
Для суммирования числа оборотов вала двигателя или механизма применяют специальные счетчики оборотов. Упрощенная принципиальная схема дистанционного электромеханического счетчика представлена на рис. 5.
На валу 9 жестко закреплены храповое колесо 5 и цифровой барабан 7, а цифровые барабаны 6 свободно насажены на вал. Барабаны кинематически соединены между собой так, что при полном обороте каждого из них соседний слева разворачивается на 1/10 оборота. На каждый барабан нанесены цифры от 0 до 9. Таким образом обеспечивается десятичная система отсчета. Число читается в рамке прибора 8. Колесо 5 входит в зацепление с храповиком 3, который в одну сторону перемещается под действием пружины 4, а в другую - якорем 2 электромагнитной катушки 1. Катушка получает питание Uп от сети через герметичные контакты выключателя 13. В выключателе на пластинчатой пружине с контактом закреплен постоянный магнит 12. Выключатель крепится к корпусу двигателя таким образом, чтобы между якорем 12 и стальным штифтом 10 вала 11 был установлен зазор, обеспечивающий притягивание якоря и замыкание цепи питания катушки 1.

Широко распространены магнитоуправляемые контакты (герконы). Прибор представляет собой две тонкие пермалоевые пластины с небольшим зазором между концами, впаянные в стеклянную колбу, из которой выкачан воздух (в некоторых приборах колбу заполняют инертным газом). При появлении вблизи геркона магнитного поля постоянного или электрического магнита происходит взаимное притягивание (прогиб) пластин и замыкание контактов. Постоянный магнит крепится на вращающемся валу 11 вместо штифта 10.
При каждом обороте вала независимо от направления его вращения катушка 1, получив питание, втягивает якорь 2 и смещает храповик 3 на один зуб колеса 5. При обесточивании катушки храповик под действием пружины 4 смещается в первоначальное положение, разворачивает колесо 5, вал 9 и барабан 7 на 1/10 оборота, что приводит к изменению показаний счетчика на одну единицу. Через один оборот барабана 7 соседний барабан 6 разворачивается на 1/10 оборота, отсчитав 10 оборотов вала 11, и т. д.
Читайте также: