
Где находится блок управления парктрониками на кия сид
Обновлено: 06.07.2024
Перестал работать парктроник-поехал на диагностику к ОД.
ОД приговорил один из передних датчиков, но в гарантии отказал: - сколы лкп на датчике. С кмр я еще на эту тему пообщаюсь, попытка не пытка, но это вариант мутный. Новый датчик стоит денег, которых жалко отдавать за простое устройство, стоящее 300 рублей на aliexpress.
В связи с этим вопрос: какие датчики можно поставить взамен штатных, продающихся за 5-10 тысяч за штуку?
8 12
Мне в прошлом году по кругу поменяли все датчики по гарантии, теперь пошли менять по второму кругу. Мастер сказал, что новые датчики (на новых авто с 2015 года) идут другие и с ними проблем нет. А так тоже присоединяюсь к вопросу.
2 0
2 0
Без снятия бампера не обойтись никак, датчики стоят ровно за усилителем бампера с амортизатором-прокладкой. Чтобы два раза не снимать, придется вначале искать датчик на замену. Датчики по каталогу стоят такие: 968913X0009S и 96890A50009S, плюс там в коде последние цифры - код краски.
Первый стоит ~10000, это скорее всего, два боковых, второй - ~4500. Еще интересно, чем диагностировать проблемный датчик - есть немаленькая вероятность, что ОД обманул при диагностике, ткнув в исправный, но поцарапаный.
11 14
Диагностировать проще простого, вкл датчики и слушать на слух их! Работающий датчик щелкает. Подробней в гугле, не ленитесь искать. Из опыта личного, поймал камень датчиком, вышел из строя. Так что диллер прав увы.
726 445
7 1
2 0
Не думаю, что на слух получится - при включении передачи сразу же включаются все сегменты, и пищит ошибка.
11 14
Не думаю, что на слух получится - при включении передачи сразу же включаются все сегменты, и пищит ошибка.
Датчики с улицы слушаются!! Всё получится, у меня же получилось. Подносите ухо и слушаете, не заводя авто просто вкл зажигание и задействовав парктроник. Соответственно не рядом с трассой. Можно так же пальцом проверить, просто прикоснувшись не сильно давя. Рабочие датчики отдают на пальцы микро толчки. Но лично у меня когда касался пальцем датчик начинал импульсировать если на него надавить немного.

Система помощи при парковке задним ходом является электронной системой помощи, предупреждающей водителя при парковке задним ходом о наличии препятствий сбоку или сзади автомобиля. Наличие препятствий регистрируется с помощью ультразвуковых волн.


При первом и втором уровне подается прерывистый звуковой сигнал. При третьем уровне подается постоянный звуковой сигнал.(Для передних датчиков действительны второй и третий уровни предупреждения.)
1. Условия измерения — стойка из ПВХ (диаметр 75 мм, длина 3 м), нормальная температура 2. Диапазон расстояний регистрации объекта (измерение проводилось непосредственно перед датчиком)


(Работа датчиков: заднего левого, заднего центрального левого, заднего центрального правого, заднего правого)

(Порядок работы датчиков: задний центральный левый → задний левый, задний центральный левый → задний центральный правый, задний центральный правый → задний центральный левый, задний центральный правый → задний правый)


Когда датчик системы помощи при парковке задним ходом регистрирует объект, подается сигнал от звукового устройства, такого как зуммер. Датчик системы помощи при парковке задним ходом посылает сигнал в BCM по линии связи LIN. BCM включает подачу звукового сигнала для каждого датчика в порядке приоритетности. Он выполняет роль шлюза, только если посылает сигнал на визуальное устройство, такое как экран на приборной панели.
Метод обработки информации для зуммера/экрана в блоке BCM. При обработке сведений от задних боковых датчиков блок BCM обрабатывает сигналы каждого датчика непосредственно. Функции вывода на зуммер и экран. При выводе информации от средних датчиков блок BCM обрабатывает информацию согласно приоритету обоих датчиков.
Если на систему подается питание (после поворота ключа зажигания в положение ON и включения заднего хода) система MICOM проверяет каналы всех датчиков. Если ошибок не обнаружено, через 500 мс включается зуммер на 300 мс. Однако если обнаруживается ошибка, зуммер включается в режиме сигнализации, а не нормального уведомления. Функции при нормальном режиме работы описаны ниже.



Логическая схема состояний согласно приоритету уровня предупреждения приведена ниже (идентичные датчики).

1. Датчик низкого приоритета не регистрирует препятствие: α = 0 мс 2. Датчик низкого приоритета имеет 1 уровень предупреждения: α 3. Датчик низкого приоритета имеет 2 уровень предупреждения: α 1. Датчик низкого приоритета имеет 1 уровень предупреждения: ? = 1700 мс 2. Датчик низкого приоритета имеет 2 уровень предупреждения: ? = 1700 мс 3. Датчик низкого приоритета имеет 3 уровень предупреждения: ? = 700 мс

1. Область первого предупреждения (61~120 см)

2. Область второго предупреждения (31~60 см)

3. Область третьего предупреждения (менее 30 см)
Если система обнаруживает ошибочный канал при первоначальной проверке, сигнал подается через звуковую систему (по три раза на каждый датчик).

Звуковой сигнал подается, если скорость движения автомобиля задним ходом составляет 10 км/ч или менее.
Когда транспортное средство или объект движутся, последовательная подача сигналов или эффективность сигналов могут быть нарушены.
Ложное предупреждение или несрабатывание предупреждения о реальной угрозе возможны при следующих условиях
Звуковой сигнал, шум двигателя мотоцикла, пневматический тормоз большегрузного транспортного средства или другой находящийся поблизости объект, являющийся источником ультразвуковых волн.
Последовательная подача сигнала может быть нарушена из-за скорости движения задним ходом или формы объекта.
1. При регистрации ошибки выходной сигнал должен передаваться как последнее действительное значение.
1. При регистрации ошибки выходной сигнал должен передаваться как последнее действительное значение.
2. Ошибка в начальном режиме, включается зуммер.
3. Если ошибка возникает во время прямой регистрации препятствия, датчик будет посылать такой же сигнал неисправности при непрямой регистрации.
Система помощи при парковке задним ходом посылает сигнал регистрации объекта и сигнал состояния датчиков модулю BCM согласно данному документу. BCM играет решающую роль в генерировании предупреждения.
Индикатор отображает положение регистрации и данные о сигнале предупреждения. Если регистрируется препятствие, модуль находит данные о ближайшем препятствии и отображает их первыми.
(Пример. Если в первом шаге препятствие регистрирует задний левый датчик, а в третьем шаге – задний правый, то преимущество будет у правого заднего датчика.)

Уже 2 недели собирался с мыслями написать в БЖ. Но пока не проверил все, что можно не писал.
Идея штатного парктроника пришла неожиданно для самого себя. Как обычно путешествовал по польской разборке и наткнулся на датчики. Ценник доступный относительно новых(от 7500 за один оригинальный), но через пару дней нашел в Перми по еще более доступной цене и тогда решился на покупку всех комплектующих.
Согласно схемам ilcats(очень помог VIN от комплектации люкс 2018г, спасибо SicVolo ) определил, что необходимо:
2 датчика 95720А2500(KSC)- KSC – цвет моих датчиков
2 датчика 95720А2600 – насколько понял они только черные, это и логично т.к. ставятся в накладки бампера
2 накладки под датчики с кронштейном 86662А2610(86664А2610 для России) и 86661А2610(86663А2610 для России).
Коса/жгут проводки(видел можно купить отдельно фишки, но это дороже) 91891А2240(рест)
Также кнопку выключения/включения 93310-А2000, панель под нее 84633А2100LEF и консоль 84631A2300WK – думаю они не важны!
2 кронштейна под датчики. На сид номера не нашел, подобрал от соляриса. Уже проверил, вроде оно 866754Y000
Пока все)
Теперь по схеме:
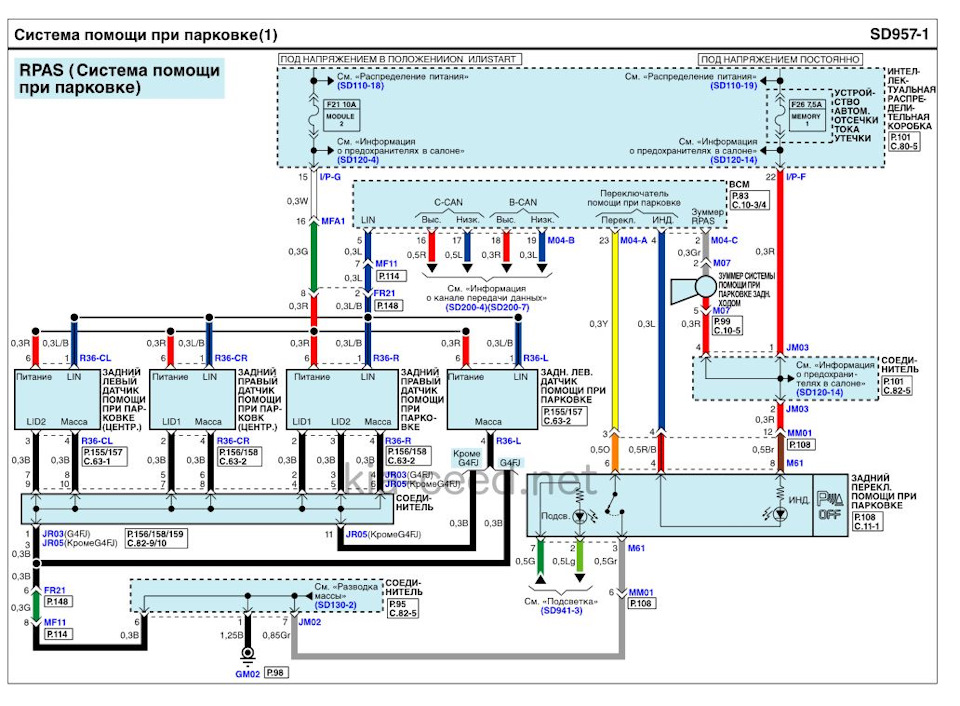

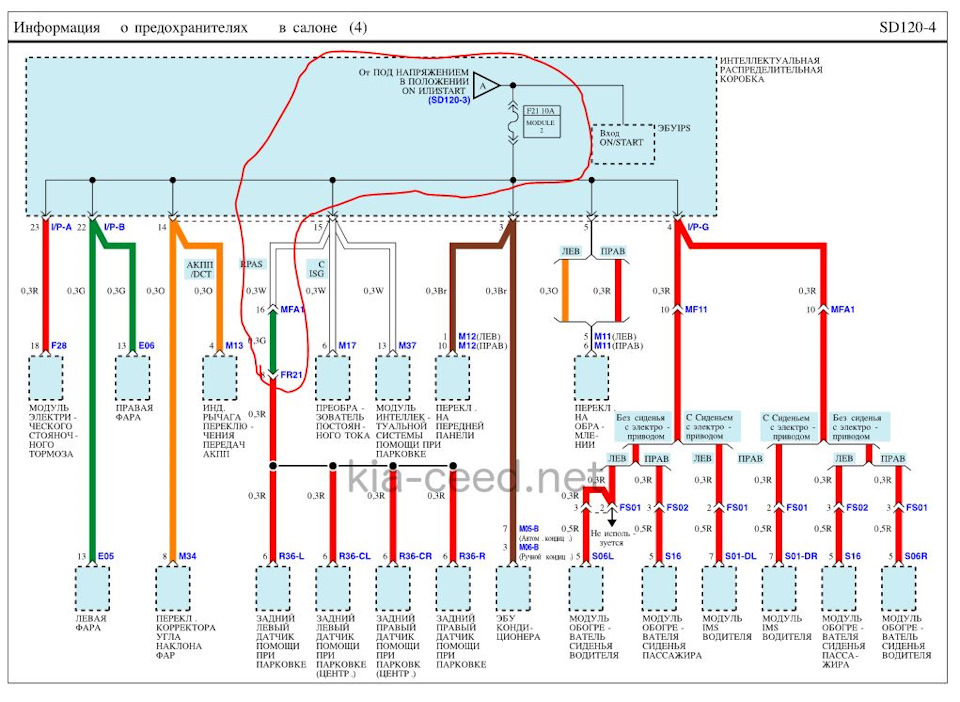
Согласно схеме на датчики постоянно подается питание в режиме пока мотором заведен или просто включено зажигание.
Проверил чертеж SD120-4 и 110-18, никаких разрывов не увидел(ни реле, ни другого коммутационного оборудования).

В итоге вывел провод с фишки I/P-G 15 пин как на схеме, но не стал вести по соединителям, а просто напрямую проложу по порогу вместе с проводом М04В 5 пин(LIN).

Остается М04С 2 пин – зуммер по схеме. Но в блоке уже есть зуммер, подтверждению этому нашел в описании парктроника(KIA GDS). Нужно будет проверить данный пин на наличие в нем провода(нет провода). Зуммер встроен в блок, ради такого дела пришлось вскрыть блок


Цены пока не буду писать. Скажу, что удовольствие не дешевое, но оно того стоит(для меня)
Парни которые меня терпели все это время:
SicVolo
Safonov827
Stepanv
GalanovMS
URS-Tuning
Большое человеческое, спасибо!
Перестал работать парктроник-поехал на диагностику к ОД.
ОД приговорил один из передних датчиков, но в гарантии отказал: - сколы лкп на датчике. С кмр я еще на эту тему пообщаюсь, попытка не пытка, но это вариант мутный. Новый датчик стоит денег, которых жалко отдавать за простое устройство, стоящее 300 рублей на aliexpress.
В связи с этим вопрос: какие датчики можно поставить взамен штатных, продающихся за 5-10 тысяч за штуку?
8 12
Мне в прошлом году по кругу поменяли все датчики по гарантии, теперь пошли менять по второму кругу. Мастер сказал, что новые датчики (на новых авто с 2015 года) идут другие и с ними проблем нет. А так тоже присоединяюсь к вопросу.
2 0
2 0
Без снятия бампера не обойтись никак, датчики стоят ровно за усилителем бампера с амортизатором-прокладкой. Чтобы два раза не снимать, придется вначале искать датчик на замену. Датчики по каталогу стоят такие: 968913X0009S и 96890A50009S, плюс там в коде последние цифры - код краски.
Первый стоит ~10000, это скорее всего, два боковых, второй - ~4500. Еще интересно, чем диагностировать проблемный датчик - есть немаленькая вероятность, что ОД обманул при диагностике, ткнув в исправный, но поцарапаный.
11 14
Диагностировать проще простого, вкл датчики и слушать на слух их! Работающий датчик щелкает. Подробней в гугле, не ленитесь искать. Из опыта личного, поймал камень датчиком, вышел из строя. Так что диллер прав увы.
726 445
7 1
2 0
Не думаю, что на слух получится - при включении передачи сразу же включаются все сегменты, и пищит ошибка.
11 14
Не думаю, что на слух получится - при включении передачи сразу же включаются все сегменты, и пищит ошибка.
Датчики с улицы слушаются!! Всё получится, у меня же получилось. Подносите ухо и слушаете, не заводя авто просто вкл зажигание и задействовав парктроник. Соответственно не рядом с трассой. Можно так же пальцом проверить, просто прикоснувшись не сильно давя. Рабочие датчики отдают на пальцы микро толчки. Но лично у меня когда касался пальцем датчик начинал импульсировать если на него надавить немного.
Система помощи при парковке задним ходом является электронной системой помощи, предупреждающей водителя при парковке задним ходом о наличии препятствий сбоку или сзади автомобиля. Наличие препятствий регистрируется с помощью ультразвуковых волн.
При первом и втором уровне подается прерывистый звуковой сигнал. При третьем уровне подается постоянный звуковой сигнал.(Для передних датчиков действительны второй и третий уровни предупреждения.)
1. Условия измерения — стойка из ПВХ (диаметр 75 мм, длина 3 м), нормальная температура 2. Диапазон расстояний регистрации объекта (измерение проводилось непосредственно перед датчиком)
(Работа датчиков: заднего левого, заднего центрального левого, заднего центрального правого, заднего правого)
(Порядок работы датчиков: задний центральный левый → задний левый, задний центральный левый → задний центральный правый, задний центральный правый → задний центральный левый, задний центральный правый → задний правый)
Когда датчик системы помощи при парковке задним ходом регистрирует объект, подается сигнал от звукового устройства, такого как зуммер. Датчик системы помощи при парковке задним ходом посылает сигнал в BCM по линии связи LIN. BCM включает подачу звукового сигнала для каждого датчика в порядке приоритетности. Он выполняет роль шлюза, только если посылает сигнал на визуальное устройство, такое как экран на приборной панели.
Метод обработки информации для зуммера/экрана в блоке BCM. При обработке сведений от задних боковых датчиков блок BCM обрабатывает сигналы каждого датчика непосредственно. Функции вывода на зуммер и экран. При выводе информации от средних датчиков блок BCM обрабатывает информацию согласно приоритету обоих датчиков.
Если на систему подается питание (после поворота ключа зажигания в положение ON и включения заднего хода) система MICOM проверяет каналы всех датчиков. Если ошибок не обнаружено, через 500 мс включается зуммер на 300 мс. Однако если обнаруживается ошибка, зуммер включается в режиме сигнализации, а не нормального уведомления. Функции при нормальном режиме работы описаны ниже.
Логическая схема состояний согласно приоритету уровня предупреждения приведена ниже (идентичные датчики).
1. Датчик низкого приоритета не регистрирует препятствие: α = 0 мс 2. Датчик низкого приоритета имеет 1 уровень предупреждения: α 3. Датчик низкого приоритета имеет 2 уровень предупреждения: α 1. Датчик низкого приоритета имеет 1 уровень предупреждения: ? = 1700 мс 2. Датчик низкого приоритета имеет 2 уровень предупреждения: ? = 1700 мс 3. Датчик низкого приоритета имеет 3 уровень предупреждения: ? = 700 мс
1. Область первого предупреждения (61~120 см)
2. Область второго предупреждения (31~60 см)
3. Область третьего предупреждения (менее 30 см)
Если система обнаруживает ошибочный канал при первоначальной проверке, сигнал подается через звуковую систему (по три раза на каждый датчик).
Звуковой сигнал подается, если скорость движения автомобиля задним ходом составляет 10 км/ч или менее.
Когда транспортное средство или объект движутся, последовательная подача сигналов или эффективность сигналов могут быть нарушены.
Ложное предупреждение или несрабатывание предупреждения о реальной угрозе возможны при следующих условиях
Звуковой сигнал, шум двигателя мотоцикла, пневматический тормоз большегрузного транспортного средства или другой находящийся поблизости объект, являющийся источником ультразвуковых волн.
Последовательная подача сигнала может быть нарушена из-за скорости движения задним ходом или формы объекта.
1. При регистрации ошибки выходной сигнал должен передаваться как последнее действительное значение.
1. При регистрации ошибки выходной сигнал должен передаваться как последнее действительное значение.
2. Ошибка в начальном режиме, включается зуммер.
3. Если ошибка возникает во время прямой регистрации препятствия, датчик будет посылать такой же сигнал неисправности при непрямой регистрации.
Система помощи при парковке задним ходом посылает сигнал регистрации объекта и сигнал состояния датчиков модулю BCM согласно данному документу. BCM играет решающую роль в генерировании предупреждения.
Индикатор отображает положение регистрации и данные о сигнале предупреждения. Если регистрируется препятствие, модуль находит данные о ближайшем препятствии и отображает их первыми.
(Пример. Если в первом шаге препятствие регистрирует задний левый датчик, а в третьем шаге – задний правый, то преимущество будет у правого заднего датчика.)
Читайте также: