
Ошибка на спидометре no can
Добавил пользователь Дмитрий К. Обновлено: 20.09.2024
Давно ждали информацию по CAN протоколам?
К сожалению она ни когда не станет полной - новые протоколы выходят постоянно.
Для 90 % машин настройки такие:
Скорость 250
Формат адреса 29
Тайм аут 50,
Приоритет 3.
Всем им важен VIN - ошибка приводит к несовпадению.
Далее, все произведенные тахографы на данный момент не работают по CAN с фишкой С, так что единственный выход сегодня - не включать ее. При этом отключится только встроенный навигатор. Вы их много видели? Тем не менее в будущем будет работать, но это связано с изменением конструктива, а не программы. Таким образом на старых моделях это и не заработает.
Еще далее Некоторые ТС заблокированы на применение конкретной модели тахографа.
Например Скания - Стоунридж, Ивекко -1381 или 1324.
Поэтому вводится новый параметр - "диагностический протокол"
0-открытый протокол (по умолчанию)
1 - Континенталь 1381 (на те марки, где у них монополия)
2 - Стоунридж на Сканию.
3 - Континенталь 1324 на Ивекко
4 - Континенталь 1381 на Ивекко
На днях появится новая программа калибровки, там все эти данные будут удобно меняться.
В настоящий момент - в меню, настройки CAN.
Ну а дополнительные параметры -считывайте с ранее установленных устройств.
Табличка в перспективе будет, но пока.
Пытались опять откалибровать Ивеко по Вашим рекомендациям (замена 1324 на Штрих). Без успешно. 0-открытый протокол (по умолчанию) не выставляется. Перескакивает на 1. Может новая программа калибровки поможет? Ждем информацию
Пытались опять откалибровать Ивеко по Вашим рекомендациям (замена 1324 на Штрих). Без успешно. 0-открытый протокол (по умолчанию) не выставляется. Перескакивает на 1. Может новая программа калибровки поможет? Ждем информацию
Не внимательно прочитали то,Ю что написано:
для ивекко, замена 1324 - протокол 3.
Буквально вчера сделал замену 1324 на Штрих. Была одна проблема -
при считывании данных 1324 Писал кол-во импульсов на 1000 оборотов 4000, а кол-во импульсов на 1 оборот - 6.
Сначала поставил 4000, но.
Эксперементальным путем показал 6000. При 4 000 не правильно указывал передачу.
_________________
Если хочешь чего-либо добиться - добивайся!
Опустишь руки - опустишься.
Старость начинается когда человек перестает учиться.
Пытались опять откалибровать Ивеко по Вашим рекомендациям (замена 1324 на Штрих). Без успешно. 0-открытый протокол (по умолчанию) не выставляется. Перескакивает на 1. Может новая программа калибровки поможет? Ждем информацию
Не внимательно прочитали то,Ю что написано:
для ивекко, замена 1324 - протокол 3.
Буквально вчера сделал замену 1324 на Штрих. Была одна проблема -
при считывании данных 1324 Писал кол-во импульсов на 1000 оборотов 4000, а кол-во импульсов на 1 оборот - 6.
Сначала поставил 4000, но.
Эксперементальным путем показал 6000. При 4 000 не правильно указывал передачу.
Сегодня в паре с ником "шев" следуя вашим рекомендациям снова пытались установить штрих на IVECO STRALIS AT440S43T взамен аналогового 1324,но безрезультатно. При подключении Штриха бортовой компьютер а/м перестает отображать параметры о расходе топлива(мгновенный расход,расход на км пути и т.д).При этом остаётся работать экономайзер,но только на пониженной передачи,при переключении на высшую передачу и при наборе скорости выше 15км/ч,экономайзер тоже тухнет.На тахографе и на спидометре скорость отображается нормально.Да и ещё у него на панели приборов постоянно горит индикация о неисправности тахографа(!),причём что со старым 1324,что с новым шрихом!?Может все же дело не в тахографе,а в автомобиле. К тахографу подключены З фишки:А,В,D-контакт 7.Может все же кто нибудь сталкивался с такой проблемой,и поможет нам разобраться?
Пытались опять откалибровать Ивеко по Вашим рекомендациям (замена 1324 на Штрих). Без успешно. 0-открытый протокол (по умолчанию) не выставляется. Перескакивает на 1. Может новая программа калибровки поможет? Ждем информацию
Не внимательно прочитали то,Ю что написано:
для ивекко, замена 1324 - протокол 3.
Буквально вчера сделал замену 1324 на Штрих. Была одна проблема -
при считывании данных 1324 Писал кол-во импульсов на 1000 оборотов 4000, а кол-во импульсов на 1 оборот - 6.
Сначала поставил 4000, но.
Эксперементальным путем показал 6000. При 4 000 не правильно указывал передачу.
Сегодня в паре с ником "шев" следуя вашим рекомендациям снова пытались установить штрих на IVECO STRALIS AT440S43T взамен аналогового 1324,но безрезультатно. При подключении Штриха бортовой компьютер а/м перестает отображать параметры о расходе топлива(мгновенный расход,расход на км пути и т.д).При этом остаётся работать экономайзер,но только на пониженной передачи,при переключении на высшую передачу и при наборе скорости выше 15км/ч,экономайзер тоже тухнет.На тахографе и на спидометре скорость отображается нормально.Да и ещё у него на панели приборов постоянно горит индикация о неисправности тахографа(!),причём что со старым 1324,что с новым шрихом!?Может все же дело не в тахографе,а в автомобиле. К тахографу подключены З фишки:А,В,D-контакт 7.Может все же кто нибудь сталкивался с такой проблемой,и поможет нам разобраться?
У Ивеко, если будет одна ошибка накапливаться в памяти, то потом её можно потушить только с помощью дилерской программы.
Попробуйте поставить 4 диагностический протокол.
Параметны кан:
250кбит/с
29бит
50мс (попробуйте 20мс поставить и посмотреть)
Кроме ошибки по тахографу на приборной панели горят ещё какие-нибудь, если да, то в какой момент появились?
_________________
С уважением, Макар.
Уже пробовали другие протоколы.При их установки спидометр зашкаливает и появляется ошибка о не исправности приборки.С третьим протоколом такого нет.Параметры кан тоже меняли,при 20мс также зашкаливает спидометр. Параметр кан при считывании 125кбит/с,29бит,50мс..При отсутствии карточки в тахографе,загорается буковка Т .
Уже пробовали другие протоколы.При их установки спидометр зашкаливает и появляется ошибка о не исправности приборки.С третьим протоколом такого нет.Параметры кан тоже меняли,при 20мс также зашкаливает спидометр. Параметр кан при считывании 125кбит/с,29бит,50мс..При отсутствии карточки в тахографе,загорается буковка Т .
_________________
Если хочешь чего-либо добиться - добивайся!
Опустишь руки - опустишься.
Старость начинается когда человек перестает учиться.
Уже пробовали другие протоколы.При их установки спидометр зашкаливает и появляется ошибка о не исправности приборки.С третьим протоколом такого нет.Параметры кан тоже меняли,при 20мс также зашкаливает спидометр. Параметр кан при считывании 125кбит/с,29бит,50мс..При отсутствии карточки в тахографе,загорается буковка Т .
_________________
С уважением, Макар.
_________________
С уважением, Макар.
Есть вопрос. Спустя какое-то время выясняется, что на авто большая разница на одометре спидометра с показаниями пробега в тахографе. Понятное дело, что точно цифра в цифру практически никогда не будет, и тем более с механическим приводом спидометра. Как быть и что отвечать клиентам, у которых как ни выпендривайся, но разница все равно есть. Понимаю, что калибруется только тахограф, а спидометр не во всех случаях возможно подключить к тахографу, потому думаю, что данные одометра водителям надо списывать не со спидометра, а с тахографа. Но нигде не могу найти документов, регламентирующих это.
Кто подскажет, как разобраться с данной ситуацией? Ведь если не объяснять клиентам достоверно, то думать будут плохо об услугах и/или о точности измерений тахографов..
Есть вопрос. Спустя какое-то время выясняется, что на авто большая разница на одометре спидометра с показаниями пробега в тахографе. Понятное дело, что точно цифра в цифру практически никогда не будет, и тем более с механическим приводом спидометра. Как быть и что отвечать клиентам, у которых как ни выпендривайся, но разница все равно есть. Понимаю, что калибруется только тахограф, а спидометр не во всех случаях возможно подключить к тахографу, потому думаю, что данные одометра водителям надо списывать не со спидометра, а с тахографа. Но нигде не могу найти документов, регламентирующих это.
Кто подскажет, как разобраться с данной ситуацией? Ведь если не объяснять клиентам достоверно, то думать будут плохо об услугах и/или о точности измерений тахографов..
Для того, чтобы показания соответствовали используйте CAN-спидометры, пусть клиент раскошелится.
И у него стоит не "спидометр", а "прибор показывающий скорость". Это большая разница, пусть посмотрит его допустимую погрешность в документации.
Когда вы настраиваете B6- или B7-коэффициенты ориентируетесь на скорость, правильная скорость - удобство водителя! Соблюдение скоростного режима это тоже безопасность плюс отсутствие штрафов. Если ему необходимо соответствие показаний, помимо первого моего предложения, поменяйте коэффициент B7=текущее значение B7 * (пробег на тахографе / пробег на спидометре)
_________________
С уважением, Макар.
Да знают они, не раз говорили им о том, что показания тахографа первичны и наиболее точны по сравнению с одометром и "стрелкой" на спидометре, но их интересует, где на бумаге написано, что водитель списывает показания одометра не со спидометра, а с тахографа. Такие вопросы задают обычно клиенты - старейшие предприятия, в которых работают люди "старой закалки", привыкшие, что на все телодвижения должна быть соответствующая бумага. Вот и задают вопросы как минимум "почему не устраните погрешность" и "в каких НПА указания о пользовании одометром с тахографа" ))
Да знают они, не раз говорили им о том, что показания тахографа первичны и наиболее точны по сравнению с одометром и "стрелкой" на спидометре, но их интересует, где на бумаге написано, что водитель списывает показания одометра не со спидометра, а с тахографа. Такие вопросы задают обычно клиенты - старейшие предприятия, в которых работают люди "старой закалки", привыкшие, что на все телодвижения должна быть соответствующая бумага. Вот и задают вопросы как минимум "почему не устраните погрешность" и "в каких НПА указания о пользовании одометром с тахографа" ))
Пусть читают документацию к своему "спидометру", там указана погрешность, и её устранение дело завода производителя, я думаю.
Вы калибруете тахограф для того, чтоб он показывал точные данные, а "спидометр" они калибровали? С завода на спидометре есть погрешность и это норма.
В наших законах не фигурирует, что тахограф первичен, я не встричал, но если вы подключаете последовательно ДС - тахограф - спидометр, то тахограф первичен хотя бы физически.
_________________
С уважением, Макар.
Да знают они, не раз говорили им о том, что показания тахографа первичны и наиболее точны по сравнению с одометром и "стрелкой" на спидометре, но их интересует, где на бумаге написано, что водитель списывает показания одометра не со спидометра, а с тахографа. Такие вопросы задают обычно клиенты - старейшие предприятия, в которых работают люди "старой закалки", привыкшие, что на все телодвижения должна быть соответствующая бумага. Вот и задают вопросы как минимум "почему не устраните погрешность" и "в каких НПА указания о пользовании одометром с тахографа" ))
Говорить о том что показания тахографа первичны можно только в случае если тахограф является средством измерения. Спидометр изначально средство измерения и заметьте имеет погрешность только в одну сторону "плюс", то есть реальная скорость всегда меньше, чем на спидометре.
ЕСТРовские тахографы по европейским законам являются таковыми.
В Российской риале пока этот вопрос остается открытым, некоторые отечественные производители уже пошли по этому пути и провели соответствующие мероприятия и получили сертификаты, но .
Поэтому "люди старой закалки" задают правильные вопросы. но вот ответить на них реально может только Минпромторг ибо это его подведомственность.
Говорить о том что показания тахографа первичны можно только в случае если тахограф является средством измерения. Спидометр изначально средство измерения и заметьте имеет погрешность только в одну сторону "плюс", то есть реальная скорость всегда меньше, чем на спидометре.
ЕСТРовские тахографы по европейским законам являются таковыми.
В Российской риале пока этот вопрос остается открытым, некоторые отечественные производители уже пошли по этому пути и провели соответствующие мероприятия и получили сертификаты, но .
Кто Вам такое сказал, что спидометры являются средством измерения. Их нет в реестре средств измерений, и они не обязательны к поверке. Был вроде какой-то ГОСТ, в котором указывалось о методике его проверки, но не более. Что касается отнесения тахографов к СИ, то это гемор тот еще для всех, потому цифровые тахографы (не знаю, откуда Вы черпаете "информацию"), в т.ч. и по ЕСТР не внесены в реестр СИ, а только отходящие в мир иной аналоговые с шайбами. А, ну еще мутное смоленское чудо, которое зачем то внесли в реестр СИ.
Вопрос на самом деле стоит для автохозяйств и для их бухгалтерии, на основании чего списывать "километры" и топливо. Если выбирать спидометр vs тахограф, то и ежу понятно, что тахограф будет точнее, чем спидометр с заведомо большой погрешностью. Но кроме понятия надо еще и документ какой-то. Если иметь уверенность, что никаких указаний со стороны налоговиков нет по поводу одометра, то можно конечно приказом по предприятию провести, обязав водителей брать показания одометра с тахографа.

В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:

На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:

Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.


На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:

Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :

А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:

Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:

Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:

Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.

Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :

Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:
Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Устройство проверки спидометра CAN+G

Устройство проверки спидометра CAN+G

Предназначено для автомобилей оборудованных цифровой шиной данных CAN или использующих датчик скорости. Назначение: Устройство предназначено для проверки работы электронных спидометров автомобилей, а так же связанных систем автомобиля контролирующих скорость и пробег.
Принцип работы заключается в эмуляции движения автомобиля используя штатные процедуры работы автомобиля. Тем самым устройство обеспечивает полное прохождение сигнала скорости по всем узлам автомобиля.
Основные особенности: Поддержка: CAN и датчиков скорости в одном устройстве. Программируемая скорость. Имитация движения для работы с тахографом. Все настройки устройства с помощью переключателей. Как это работает? В режиме “датчик скорости” устройство выполняет роль датчика скорости автомобиля и полностью его заменяет. Датчик скорости выдает скорость в виде импульсного сигнала. Чем чаще импульсы, тем выше скорость. Пробег автомобиля вычисляется подсчетом количества импульсов, которые суммируются с текущим основным пробегом.
В режиме “CAN” устройство как правило выполняет роль модуля ABS и подключается к цифровой шине данных CAN. На большинстве автомобилей эта цифровая шина данных является ещё и диагностической и выведена в диагностический разъём автомобиля. Подавая сигнал скорости цифровую сеть автомобиля, в точности так же как модуль ABS, устройство заставляет автомобиль полностью ощущать себя в движении.

Переключатель “A” предназначен для выбора, как будет работать устройство, с датчиком скорости или по CAN. Переключатель “B” предназначен для коммутации выходных сигналов устройства на контакты разъёма ОБД2.
Выберите с помощью переключателя A режим работы “CAN” или “ДАТЧИК СКОРОСТИ”.




Настройка устройства в режиме CAN 1 и CAN 2 на нужную марку автомобиля: Находим в Таблице режимов нужную марку и модель автомобиля. Номер пункта таблицы соответствует номеру этой марки. Для того, чтобы установить нужный номер марки авто необходимо проделать следующее: 1. нажать кнопку устройства и удерживая её подключить устройство к диагностическому разъему автомобиля (кнопку не отпускаем). 2. индикатор загорится на 2 сек и, погаснет, с этого момента необходимо отсчитывать количество последующих вспышек индикатора, которое соответствует номеру устанавливаемой марки авто. Когда индикатор включится нужное количество раз, необходимо отпустить кнопку устройства. 3. индикатор погаснет, устройство перезагрузится, затем быстрыми морганиями отобразит номер установленной марки автомобиля.. Если нужный режим установлен правильно, включаем зажигание и контролируем скорость и увеличение пробега по одометру. Если нет повторяем процедуру. Для некоторых автомобилей необходимо подобрать оптимальный подрежим, обеспечивающий максимальную скорость намотки. Переключение подрежима осуществляется кратковременным нажатием на кнопку устройства, (только когда зажигание включено и индикатор устройства горит постоянно). В каждом режиме может быть до от 4 до 16 подрежимов, переключающихся по кольцу. Последний выбранная марка автомобиля и подрежим запоминается.
При подключении устройства к диагностическому разъёму индикатор загорится на 2 секунды, показывая, что питание присутствует и устройство работает. Затем индикатор гаснет на 2 секунды, и начинает быстро с интервалом 0,5 сек, отображать номер марки автомобиля. После этого включаем зажигание. Примечание, новое устройство поставляется с установленной маркой автомобиля 1. Если параметры шины данных автомобиля и выбранной марки авто совпадают, индикатор устройства будет гореть постоянно, и показания одометра начнут увеличиваться. В этом состоянии можно с помощью кнопки, переключать подрежимы работы устройства. Работа устройства контролируется по индикатору основного или суточного пробега. В Рено Fluense и Latitude только по основному пробегу.
В предыдущей статье мы поговорили о проблемах в шине передачи данных CAN, возникших в результате износа аккумуляторной батареи и просадки питающего напряжения при запуске ниже порога работоспособности шины. Сегодня продолжим разговор о CAN-шине, но немного в другом ключе: прежде всего вспомним принцип ее работы, а затем рассмотрим один из случаев топологии шины и разберем осциллограмму дефекта.
Эта шина используется чаще всего как средство обмена данными в системах, для которых критично быстродействие и время принятия решения. Таковыми являются, например, система управления движением, объединяющая между собой блоки управления двигателем, автоматической трансмиссией, антиблокировочной системой тормозов, усилителем руля и т.п.
Конструктивно шина представляет собой неэкранированную витую пару. Провода шины называются CAN High и CAN Low.
Шина может находиться в двух состояниях:
- Рецессивное состояние, или логическая единица. Оба провода в этой ситуации имеют практически одинаковый потенциал: и на проводе CAN High, и на проводе CAN Low присутствует около 2 , 5 В. В рецессивном состоянии шина может находиться сколь угодно долго, хотя в реальности этого не происходит, ведь рецессивное состояние – это всего лишь пауза между сеансами передачи информации.
- Доминантное состояние, или логический ноль. В него шина переходит тогда, когда один из входящих в сеть блоков управления начинает передачу данных. Потенциалы на проводах шины меняются следующим образом: на проводе CAN High потенциал повышается на один вольт, на проводе CAN Low наоборот, становится на один вольт ниже.
Рассмотрим форму сигнала шины, чтобы обосновать ее помехоустойчивость:
На рисунке показаны доминантный и рецессивный уровни шины, а также воздействие на шину электромагнитной помехи. Особенностью обработки сигналов шины является то, что в расчет берется не сам уровень сигнала, а разница уровней между проводами CAN High и CAN Low. При рецессивном уровне эта разница близка к нулю, при доминантном уровне она максимальна.
В витой паре провода располагаются очень близко друг к другу. Если возникает внешняя электромагнитная помеха X, то она является синфазной и наводит одинаковый всплеск напряжения в обоих проводах шины. В итоге на обоих проводах появляется наведенный помехой импульс, но разница потенциалов между проводами при этом не меняется. Это позволяет эффективно подавлять внешние помехи, что является большим преимуществом CAN-шины.
На самом деле витая пара – давно известный способ борьбы с помехами. В медицине, например, в кардиостимуляторах, где требуется высочайшая помехоустойчивость, она применяется очень широко.
Сигнал шины поступает в блок управления на дифференциальный усилитель и обрабатывается. Иллюстрация поясняет процесс обработки:
Большинство автопроизводителей придерживаются скорости передачи 500 кБд, соответственно, продолжительность одного бита при этом составит 2 мкс.
На современных автомобилях шина CAN очень разветвленная. Чтобы не перегружать линию большим количеством передаваемых данных, шина может состоять из нескольких ветвей, объединенных межсетевым шлюзом, иначе называемым Gateway. В итоге сеть представляет собой несколько ответвлений, в том числе и на диагностический разъем, использующих разную скорость и протоколы обмена.
Поэтому топология шины – вопрос для диагноста очень актуальный и, к сожалению, довольно сложный. Из тех электрических схем, которыми располагает диагност, не всегда можно понять топологию. Но в документации некоторых автопроизводителей приводится полная и подробная информация, в этом случае задача сильно упрощается.
Не зная тонкостей организации шины, найти в ней неисправность бывает достаточно сложно. Например, при наличии окисления контактов в разъеме пропадает связь с целым рядом блоков управления. Наличие под рукой топологии шины позволяет легко находить подобные проблемы, а отсутствие приводит к большой потере времени.
Ну что ж, мы немного освежили в памяти теорию шины, теперь самое время перейти к практике.
Перед нами автомобиль Infinitit Q 50 , оснащенный весьма редким турбированным мотором VR 30 DDT объемом 3 . 0 л и мощностью 400 лошадиных сил. Но проблема заключается не в этом замечательном агрегате, а как раз в CAN-шине: подключив диагностический сканер, не удается установить связь с доброй половиной блоков управления.
Нам повезло – Nissan относится к тому узкому кругу производителей, которые дают диагностам качественную и полноценную информацию. В том числе есть в документации и подробная топология бортовой шины обмена данными. Открываем, смотрим:
Следует сказать, что приведенная блок-схема достаточно общая. В документации имеется гораздо более подробная электрическая схема со всеми проводами и номерами контактов в блоках, но сейчас она нам пока что ни к чему, нам важно понять общую топологию.
Итак, первое, что нужно увидеть, это то, что вся сеть разделена на три большие ветви, обведенные пунктиром:
- CAN communication circuit 1 (Коммуникационная цепь CAN 1 );
- CAN communication circuit 2 (Коммуникационная цепь CAN 2 );
- Chassis communication circuit (Коммуникационная цепь шасси).
Первые две цепи связаны между собой посредством CAN gateway (найдите его на иллюстрации). Цепь шасси связана с цепью CAN 2 через блок управления шасси, который также играет роль своеобразного Gateway.
А теперь вновь обратимся к сканеру и посмотрим, какие из блоков управления не выходят на связь. Дилерский сканер предоставляет нам очень удобную функцию: на экран выводятся блоки каждой из цепей по отдельности, а цветом отображается возможность (зеленый) либо невозможность (красный) установить с ними связь. Вот блоки цепи CAN 1 :
А это – блоки цепи CAN 2 . Как видно, связи с ними попросту нет:
Также нет связи с блоками цепи шасси, но это и понятно: эта цепь, согласно блок-схеме, подключена к цепи CAN 2 .
Ну что ж, задача почти решена, осталось лишь локализовать неисправность. А для этого воспользуемся мотортестером и снимем осциллограмму на проводах шины сначала в CAN 1 , а затем в CAN 2 и сравним их.
Сделать это очень несложно, ведь обе шины выведены прямо на диагностический разъем. Согласно более подробной схеме, о которой упоминалось выше, на контакты диагностической колодки 6 и 14 выведены провода CAN 1 , а на контакты 12 и 13 – провода CAN 2 .
Снимаем осциллограмму в цепи CAN 1 . Она имеет прямо-таки академический вид:
Давайте обмерим ее с помощью линеек.
- На проводе CAN High в рецессивном состоянии потенциал составил 2 , 26 В, на проводе CAN Low – 2 , 25 В.
- На проводе CAN High в доминантном состоянии потенциал составил 3 , 58 В, на проводе CAN Low – 1 , 41 В.
- Ширина импульса, соответствующего одной единице передаваемой информации, составляет 2 мкс (обведено красным прямоугольником).
Просто идеальное соответствие теории и практики. Конечно, полосы пропускания нашего прибора явно недостаточно для корректного отображения сигнала, слишком уж широк его спектр. Однако, если закрыть на это глаза, то вполне можно оценить качество сигнала и сделать необходимые выводы.
А теперь делаем ту же операцию на контактах диагностической колодки 12 и 13 , чтобы получить осциллограмму сигнала CAN 2 . Вот она:
Для наглядности масштаб осциллограмм на обеих иллюстрациях один и тот же.
Но в нашем случае все проще. Кстати, маленький лайфхак, возьмите на заметку. В автомобилях Nissan и Infiniti чаще всего причиной наличия мусора в CAN-шине является блок ABS. Сняв разъем с блока, сразу получаем нормальный обмен и связь сканера со всеми блоками ветви CAN 2 :
Обратите внимание на то, что связь в цепи CAN 2 есть со всеми блоками, кроме блока ABS, ведь он отключен.
Завершая разговор, хотелось бы обратить ваше внимание еще на один важный нюанс. Частота следования импульсов по CAN-шине составляет 500 кГц. Поэтому при получении осциллограммы необходимо задействовать максимально возможную частоту дискретизации мотортестера, на какую только он способен.
Если частоту дискретизации вы зададите низкую, то импульсы на осциллограмме будут сильно искажены. В качестве примера посмотрите, как выглядит осциллограмма сигнала CAN-шины при специально сниженной частоте дискретизации прибора:
Красным прямоугольником обведено время, в которое укладывается одно деление сетки. Оно составляет 0 , 2 мс. А на осциллограмме, которую мы рассматривали ранее, это время было равно 5 мкс, поэтому отображение импульсов было более правильным. Имейте это ввиду и не допускайте ошибок!
Протокол CAN. Описание, формат кадра, контроль ошибок.

Приветствую всех на нашем сайте! Сегодняшняя статья будет целиком и полностью посвящена обзору протокола CAN. А в одной из следующих статей мы реализуем обмен данными по CAN на практике. Но не буду забегать вперед…
Основные характеристики протокола CAN:
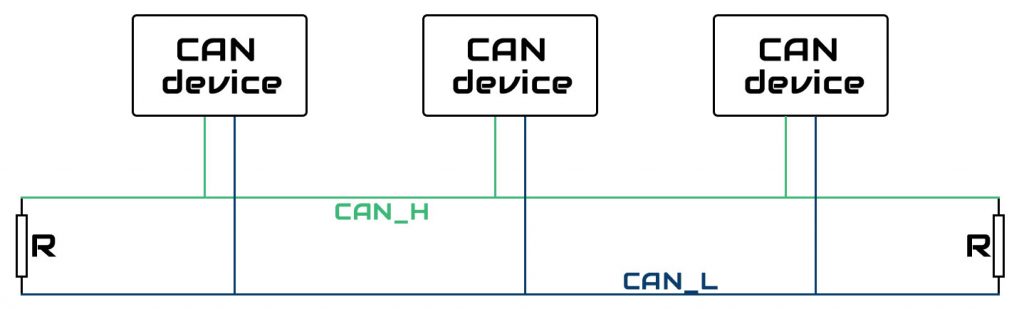
Давайте перейдем к физическому уровню протокола. В интернете можно найти много противоречивой информации на этот счет, но истина тут одна 🙂 Стандарт CAN компании Bosch не регламентирует физический уровень передачи данных, поэтому могут использоваться абсолютно разные варианты, например, оптоволокно. На практике же чаще всего используется соединение посредством двухпроводной дифференциальной линии (витой пары). Ориентировочная максимальная длина линии для разных скоростей передачи данных составляет:
| Скорость | Длина линии |
|---|---|
| 1 Мбит/с | 50 м |
| 500 кбит/с | 100 м |
| 125 кбит/с | 500 м |
| 10 кбит/с | 5 км |
Важным условием работоспособности шины является наличие на концах витой пары согласующих резисторов, которые также называют терминаторами, с сопротивлением 120 Ом:
При использовании электрического сигнала устройство, желающее передать в линию доминантный бит, может подтянуть линию к земле. Это и приведет к тому, что на линии будет доминантный бит независимо от того, что выдают на линию другие участники коммуникации.
Это свойство используется для арбитража в сети CAN. Пусть несколько устройств хотят передать данные. Каждый из этих передатчиков сравнивает значение, которое он передает, со значением, фактически присутствующим на линии. В том случае, если передаваемое значение совпадает со считанным, устройство продолжает высылать свои данные. Если значения совпали у нескольких устройств, то все они продолжают передачу как ни в чем не бывало.
Продолжается это до того момента, когда значения станут различными. Если несколько устройств хотят передать рецессивный бит, а одно — доминантный, то в соответствии с правилом, которое мы обсудили выше, на линии окажется доминантный бит. В таком случае отправленные и считанные значения для устройств, пытающихся выдать на линию рецессивное состояние, не совпадут. В этом случае они должны прекратить передачу. А тот узел, который в этот момент передавал доминантный бит, продолжит свою работу. Доминирование в чистом виде 🙂
Сигналы, которые передаются по витой паре, получили название CAN_H и CAN_L (High и Low). Доминантное состояние соответствует случаю, когда потенциал сигнала CAN_H выше потенциала CAN_L. Рецессивное — когда потенциалы равны (разница потенциалов не превышает допустимого отклонения, 0.5 В).
С этим вроде бы разобрались, давайте двигаться дальше!
Пришло время определить, как биты объединяются в кадры. Протокол CAN определяет 4 вида кадров:
- Кадр данных (data frame)
- Кадр удаленного запроса (remote frame)
- Кадр перегрузки (overload frame)
- Кадр ошибки (error frame)
Для кадра данных возможны два варианта — базовый формат и расширенный. Вот так выглядит структура базового формата:
А это структура расширенного:
| Поле | Длина | Описание |
|---|---|---|
| Начало кадра (SOF) | 1 бит | Начало передачи кадра |
| Идентификатор A (ID A) | 11 бит | Первая часть идентификатора |
| Подмена запроса на передачу (SRR) | 1 бит | Рецессивный бит |
| Бит расширения идентификатора (IDE) | 1 бит | Бит определяет длину идентификатора, для расширенного формата — рецессивный бит |
| Идентификатор B (ID B) | 18 бит | Вторая часть идентификатора |
| Запрос на передачу (RTR) | 1 бит | Доминантный бит |
| Зарезервированные биты | 2 бита | Зарезервировано |
| Длина данных (DLC) | 4 бита | Количество байт данных |
| Данные | 0 — 8 байт | Данные |
| Контрольная сумма (CRC) | 15 бит | Контрольная сумма |
| Разграничитель контрольной суммы | 1 бит | Рецессивный бит |
| Промежуток подтверждения (ACK) | 1 бит | Для приемника — доминантный бит, для передатчика — рецессивный |
| Разграничитель подтверждения | 1 бит | Рецессивный бит |
| Конец кадра (EOF) | 7 бит | Все биты рецессивные |
Кадр удаленного запроса (remote frame) представляет из себя кадр данных, описанный выше, но без поля данных и с рецессивным битом RTR. Он используется в случае, когда один узел хочет запросить данные у другого узла.
Кадр ошибки (error frame) передает устройство, обнаружившее ошибку в сети. Фрейм ошибки имеет наивысший приоритет и принимается всеми устройствами сети в обязательном порядке.
Кадр перегрузки (overload frame) используется очень редко… Его идея и назначение заключается в том, что с его помощью устройство, которое в данный момент не может принять данные, запрашивает повторную передачу этих же данных.
Первые два типа кадров — кадр данных и кадр удаленного запроса — отделяются от других кадров специальным межкадровым промежутком (паузой). А для фреймов ошибки и перегрузки предусмотрена передача без пауз, чтобы обеспечить их скорейшую обработку узлами сети.
Итак, что у нас на очереди теперь? Конечно же контроль ошибок — важнейший аспект работы протокола CAN! Стандарт предусматривает несколько механизмов контроля ошибок.
- Во-первых, это контроль передачи битов — уровень сигнала в сети сравнивается с передаваемым для каждого бита.
- Второй механизм заключается в использовании дополнительных битов (stuffing bit). После передачи любых пяти одинаковых битов автоматически добавляется передача бита противоположного значения. Таким образом, при передаче шести одинаковых битов диагностируется ошибка stuffing’а. Этот механизм используется для кодирования всех полей фреймов данных и запроса. Исключением являются только поля промежутка подтверждения, разграничителя контрольной суммы и EOF.
- Стандартная процедура проверки контрольной суммы. Передатчик вычисляет контрольную сумму для текущего кадра и передает ее в линию. В свою очередь, приемник также вычисляет контрольную сумму для принимаемых данных и сравнивает ее с тем значением, которое было отправлено передатчиком. В случае не совпадения значений диагностируется ошибка CRC.
- Также выполняется контроль битов фрейма, которые должны иметь заранее определенное значение. В случае, если реальное значение не совпадает с тем, которое ожидается, возникает ошибка.
Благодаря всем этим механизмам, вероятность необнаружения ошибки является очень низкой, что, конечно же, не может не радовать 🙂
И на этом еще не все! Каждый узел может находиться в одном из трех состояний:
- Error Active
- Error Passive
- Bus Off
Протокол CAN предусматривает, что изначально, после старта, узел находится в первом из этих состояний — Error Active. Каждое устройство имеет два счетчика ошибок:
- Счетчик ошибок передачи
- Счетчик ошибок приема
Если значение любого из этих двух счетчиков узла превысит значение 127, то узел переходит в состояние Error Passive. А если величина одного из счетчиков превысит 255, то узел перейдет в состояние Bus Off.
Разница между этими состояниями заключается в действиях узла при диагностировании ошибки:
Как видите, протокол CAN крайне интересен для изучения, надежен, безопасен, и удобен в использовании 🙂
И на этой позитивной ноте на сегодня заканчиваем, скоро займемся практической реализацией протокола, также поговорим о микросхемах и устройствах, обеспечивающих работу с CAN. Так что подписывайтесь на обновления, буду рад снова видеть вас на нашем сайте!

С момента покупки беспокоил меня тот факт что, переодически перестают работать вышеперечисленные показания, (после поездок по бездорожью и мойки).
И как то раз, эти показания перестали показывать в конец, долго не решался лезть… т.к было сопряжено с разборкой торпеды (вторая фишка CAN шины s202 там) и откладывал на потом.
И вот настал тот день когда торпеду снять пришлось! Диагностика проходила сл.образом:
Что бы узнать есть ли неисправность нужно замерить сопротивление между High (далее Hi) и Low (далее Lo) проводами. если все в норме то сопротивление будет показывать 60 Ом (поскольку на мозгах резистор на 120 Ом) если Обрыв или кабель перетерся то показания будут инными… 120 Ом или менее 60 ОМ.
У меня было 40 Ом, поэтому я посмотрел какие приборы цепляются к магистрали CAN и поочередно начал прозванивать, нашел фишку-заглушку S301 (в самом низу жгута под ручкой открытия капота) такая черная 14пиновая фишка с белой заглушкой в внутри которой перемычка.
От ECU до фишки S301 все Ок показывает штатные 120 ОМ (потому как в цепи нет больше проводов для сопротивления), при подключении перемычки сопротивление падает до 40, значит где то зеземляет или подключается многометровый пучок проводов…
к Этой же фишке цепляется CAN — ABS с него то и приходит масса с провода Lo, прозваниваем на целосность — все ОК, провод не перетерт, просто Блок ABS дает на CAN шину землю.
Бог с ней подумал я, ABS и без того мне не нужен, выдергиваю из фишки S301 2-а провода CAN приходящих от ABS и ВУАЛЯ! ПО прежнему ничего не работает(((
Замеряем сопротивление на фишке s301 и видим 120 ОМ (когда дожно быть в районе 60), не конец мучений.
Далее вынимаем контакты CAN провод TCCU (блок полного привода) с Фишки s301. и Вуаля! приборка зажглась как новогодняя елка с кучей значков, хотя в магистрали по прежнему 120 ОМ ((
Снимаем Блок TCCU с клеммы (находится он под водительским сидением), в магистрали CAN — искомые 60 Ом. визуально целый, без окислов внутри и снаружи… (неизвестно почему подключение TCCU влиет на сопротивление CAN, когда отключен со стороны фишки s301)
Вывод:
1. Блок ABS сдох и гнал по CAN шине землю (как тестировать блок еще неизвестно)
2. Блок TCCU рабочий, но по CAN шине гонять инфо отказывается. потому как привод вещь нужная, блок вставлен обратно и запрятан под сиденье, CAN вынут из общей фишки s301 (как тестировать блок еще неизвестно)
Читайте также: