
Спидометр одометр своими руками на ардуино
Добавил пользователь Владимир З. Обновлено: 19.09.2024


У собранного своими руками электронного спидометра будет три режима:
- Спидометр (определение скорости) и одометр (пройденная дистанция)
- Задача 1 – проехать 32 км (20 миль)
- Задача 2 – достичь скорости 30 км\ч
Спидометр собран на Ардуино, так что нет предела вашему воображению.
Шаг 1: Как всё работает
Принцип работы проекта прост, но для сборки его нужно понимать. В самом простом понимании, он состоит из Геркона или магнитного выключателя, установленного на раму велосипеда и еще одного магнита, установленного на спицу колеса.
Так как колесо вращается, то магнит активизирует выключатель при каждом обороте. Сигнал поступает на Ардуино, который считает количество оборотов и по ним определяет покрытую дистанцию (нужно будет сначала указать диаметр вашего колеса). Также Ардуино следит за временем и вычисляет скорость. Данные выводятся на дисплей, где они отображаются в милях в час (или в километрах, если доработать формулу).
Шаг 2: Необходимые материалы
Проект недорогой и может обойтись вам в 300-700 рублей. Сборка потребует от вас некоторые умения в пайке.
Материалы для сборки:
- Плата Ардуино – если вы возьмёте Ардуино Про Мини, то для программирования вам также понадобятся Ардуино Уно или адаптер usb-ttl (как программировать Ардуино Про Мини через Ардуино Уно) или используйте Ардуино Микро или Ардуино Уно.
- Дисплей Ардуино 16×2
- 3.7805 voltage regulator (increases the control over the contrast no major difference -optional)
- 2x выключателя для задней подсветки (опционально)
- Резистор на 220 Ом
- Потенциометр на 10k Ом
- Джамперы мамы и папы, если вы хотите, чтобы Геркон был съемным
- Геркон
- Провода
- Мгновенный переключатель, чтобы менять режимы
- Конденсатор 0.1uf чтобы уменьшить дибаунс кнопки
- Резистор 10k Ом
Список необходимого инструмента:
- Паяльник
- Припой
- Корпус
- Что-то наподобие дремеля, чтобы прорезать в корпусе отверстия для установки электроники и дисплея
- Горячий клей или что-то подобное для закрепления компонентов на местах.
Шаг 3: Код
Перед тем, как мы перейдём к электронике, будет неплохо загрузить код, чтобы вы не испытывали конфуз, метаясь между неправильно подключенными проводами. Загрузите код на Ардуино, перед этим не забыв указать диаметр колеса вашего велосипеда.
Шаг 4: Электроника
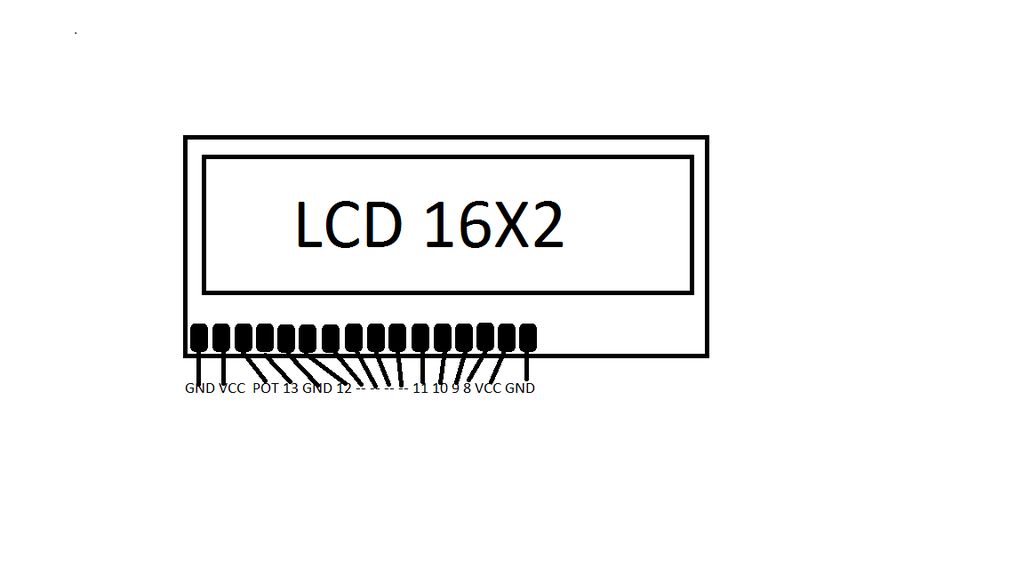
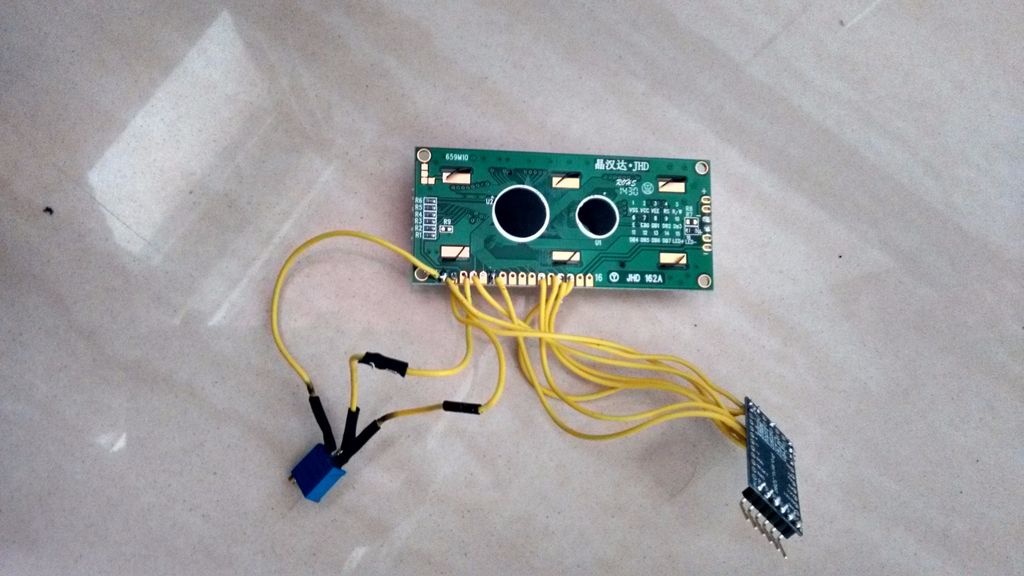
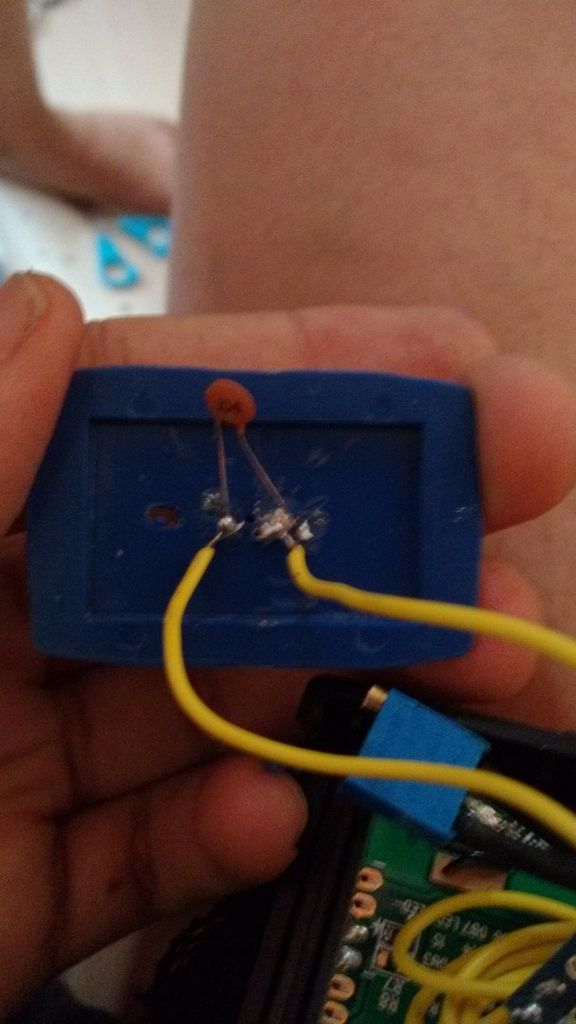



Схема соединения компонентов приложена выше, но я также напишу её отдельно.
- 1 — GND
- 2 VCC
- 3 VIPER PIN на потенциометре (концы на vcc и gnd, а центр на пин 3 дисплея)
- 4 13
- 5 gnd
- 6 12
- 7 —
- 8 —
- 9 —
- 10 —
- 11 11
- 12 10
- 13 9
- 14 8
- 15 VCC
- 16 GND
- Резистор на 220 Ом соединяем между пином 2 Ардуино и землёй
- Мгновенный переключатель соединяется с пином 2 и vcc
- Конденсатор на 0.1 uf помещаем между двумя клемами выключателя, чтобы уменьшить дибаунс
- Геркон на vcc и A0
- Резистор между A0 и gnd
После соединения всех компонентов можно запитать девайс и проверить, что всё работает.
Шаг 5: Корпус

Корпус можно сделать из пластика или дерева, он должен быть прочным и в нём должно быть достаточно пространства.
После установки переключателей, экрана, кнопки и хедеров проверьте девайс на работоспособность. Постарайтесь сделать устройство водонепроницаемым, ведь оно окажется в самых худших для работы условиях.
Шаг 6: Тестирование и устранение неполадок
Запитайте устройство от батарейки 9V и проверьте все три режима. Поднесите магнит близко к Геркону и скорость с дистанцией должны начать увеличиваться.
Рассказываю как сделать какую-либо вещь с пошаговыми фото и видео инструкциями.
Если дома есть Arduino, в гараже машина или мотоцикл, а то и хоть мотособака, в голове туманные представления о программировании — возникает желание измерить скорость движения или обороты двигателя, посчитать пробег и моточасы.
В данной статье я хочу поделиться своим опытом по изготовлению подобных поделок.

Немного физики
Для измерения частоты вращения нам понадобится датчик положения колеса/вала/круга/итп. Датчик ставится как правило один. Возможно, что он будет срабатывать не один раз на каждый оборот. Например, у вас датчик Холла и 4 магнита на колесе. Таким образом, для правильного вычисления частоты нужно знать:
- количество срабатываний датчика на один оборот К;
- минимальная ожидаемая частота Мин.
- максимальная ожидаемая частота Макс.
То есть, если частота меньше разумного минимума, то считаем, что она равна нулю, если больше максимума — игнорируем показания.
С количеством срабатываний понятно, но зачем ещё эти мины и максы? Давайте рассмотрим сначала варианты расчёта частоты.
Со скоростью всё проще, достаточно знать число π, диаметр колеса, а частоту вращения мы уже знаем.
Болванка для кода
Так как мы имеем дело с такими нежными величинами как время и пространство, то лучше сразу освоить прерывания.
Обратите внимание на модификатор volatile у переменной counter. Все переменные, которые будут изменяться в обработчике прерывания (ISR) должны быть volatile. Это слово говорит компилятору, что переменная может изменяться неожиданно и доступ к ней нельзя оптимизировать.
Функция ISR() вызывается каждый раз, когда появляется единица на ноге fqPin. Мы эту функцию не вызываем, это делает сам контроллер. Он это делает, даже когда основная программа стоит в ступоре на функции delay(). Считайте, что ISR() обслуживает событие, от вас не зависящее и данное вам свыше как setup() и loop(). Контроллер прерывает выполнение вашей программы, выполняет ISR() и возвращается обратно в ту же точку, где прерывал.
Тело функции ISR() должно быть максимально коротким, точнее, сама функция должна выполняться максимально быстро. Это важно, так как прерывается выполнение вашего кода, который может оказаться чувствительным к непредвиденным задержкам. Некоторые библиотеки отключают прерывания для выполнения чувствительных с задержкам операций, например для управления светодиодной лентой WS2812.
Считаем обороты за единицу времени.
Первое, что приходит в голову, это взять интервал времени и посчитать количество измерений.
Как и у многих простых решений, у этого есть неочевидные минусы. Для повышения точности измерений вам необходим довольно большой интервал времени. Принцип тот же, что и у Шума квантования. При времени оборота колеса сравнимом с временем подсчёта, существенные изменения скорости вращения не будут замечены. Показания такого частотомера будут различаться до двух раз на каждый отсчёт.
Для повышени точности на малой скорости можно увеличить число К, как это сделано, скажем, в автомобильной технике для датчика ABS. Можно увеличить время подсчёта. Делая и то и другое мы подходим ко второй проблеме — переполнению счётчика. Да, переполнение легко лечится увеличением количества бит, но арифметика процессора Arduino не умеет считать 64-битные числа столь быстро, как хотелось бы и как она это делает с 16-разрядными.
Увеличение времени расчёта тоже не очень хорошо тк нам надо знать частоту прямо сейчас, вот при нажатии на газ, а не через пару секунд. Да и через пару секунд мы получим скорее некое среднее значение. За это время можно несколько раз сделать врумм-врумм.
Есть другой метод. Он лишён вышеописанных недостатков, но, как водится, имеет свои.
Считаем интервал между отсчётами
Мы можем засечь время одного отсчёта и другого, вычислить разницу. Величина, обратная вычисленному интервалу и есть частота. Круто! Но есть минусы.
Что делать, если наше колесо крутится еле-еле и измеренный интервал превышает разумные пределы? Выше я предложил считать частоты ниже разумного минимума за ноль.
Определённым недостатком метода можно считать шумы квантования на высоких частотах, когда целочисленный интервал снижается до нескольких двоичных разрядов.
Так же хотелось бы некую статистику подсчётов для улучшения показаний, а мы берём лишь последнее значение.
Методом проб и ошибок я подобрал интервал отображения данных на дисплее в 250мс как оптимальный. Если чаще, то цифры размазываются, если реже — бесит тормознутость.
Комбинированный метод
Можно попробовать объединить достоинства обоих методов.
То есть, мы засекаем время не просто между отсчётами, а время между проверками данных и делим на количество отсчётов за это время. Получается усреднённый интервал между отсчётами, обратная величина от которого есть частота. Предоставим компилятору оптимизировать вычисления.
Обратите внимание, что за интервал считается не время опроса, как в первом примере, а время от последнего отсчёта до предыдущего последнего отсчёта в прошлом опросе. Это заметно поднимает точность вычисления.
Таким образом, мы можем получать вполне достоверные данные как на низких так и на высоких частотах.
Если использовать кооперативную многозадачнось, то можно сделать подсчёт, скажем раз 100мс, а вывод на дисплей раз в 250мс. Очень короткий интервал опроса снизит чувствительность к низким частотам.
Как говорят в рекламе, "но это ещё не всё".
Ошибки дребезга
Для устрашения вас предположу, что измеряем частоту вращения двигателя от индуктивного датчика зажигания. То есть, грубо говоря, на высоковольтный провод намотан кусок кабеля и мы измеряем индукцию в нём. Это довольно распространённый метод, не правда ли? Что же здесь сложного может быть? Самая главная проблема — современные системы зажигания, они дают не один импульс, а сразу пачку.

Но даже обычная система зажигания даёт переходные процессы:

Старинные же кулачковые контактные вообще показывают замечательные картинки.
Как с этим бороться? Частота вращения не может вырасти мгновенно, не даст инерция. Кроме того, в начале статьи я предложил ограничить частоту сверху разумными рамками. Отсчёты, что происходят слишком часто можно просто игнорировать.
Другой вид помех — это пропадание отсчётов. Из-за той же инерции у вас не может измениться частота в два раза за одну миллисекунду. Понятно, что это зависит от того, что вы собственно измеряете. Частота биения крыльев комара может, вероятно и за миллисекунду упасть до нуля.
Статистическая обработка в данном случае становится уже достаточно сложной для маленькой функции обработки прерывания и я готов обсудить варианты в комментариях.
Особенности измерения скорости движения и скорости вращения.
При измерении скорости вращения бензинового двигателя надо обязательно учесть величину К, которая совсем не очевидна. Например, вы намотали провод на кабель свечи и ожидаете, что там будет одна искра на один оборот. Это совсем не так. Во-первых, у 4-тактного двигателя вспышка происходит один раз на два оборота, у 2-тактного один раз на оборот коленвала. Во-вторых, для упрощения системы зажигания коммутатор подаёт искру на неработающие в данный момент цилиндры, типа на выпуске. Для получения правильного К надо почитать документацию на двигатель или подсмотреть показания эталонного тахометра.
При измерении скорости движения частота обновления дисплея не имеет большого значения, особенно, если вы рисуете цифры, а не двигаете стрелку. Даже обновление информации раз в секунду не вызовет отторжения. С оборотами двигателя всё наоборот, индикатор должен откликаться гораздо быстрее на изменение оборотов.
Вывод информации
Типичная обида начинающего разработчика автомобильной и мотоциклетной электроники "стрелки дёргаются, цифры нечитабельны" лечится простым способом — надо обманывать клиента. Вы что думаете, автомобильный тахометр всегда показывает вам правду? Конечно же нет! Хотя вам этот обман нравится и вы хотите, чтобы ваш прибор дурил голову так же.
Стрелки
Если включить зажигание на новом модном автомобиле или мотоцикле, стрелки приборов сделают красивый вжух до максимума и медленнее опадут до нуля. Вот! Вот это нам и надо сделать. Надо, чтобы при показе максимальной величины стрелка не метнулась к ней мгновенно и не упала как акции лохотрона в ноль.
Итак, нам надо учитывать максимальную скорость стрелки на увеличение и максимальную на уменьшение показаний. Совсем хорошо сделать эти скорости нелинейными, чтобы стрелка сначала двигалась быстрее, а потом чуть помедленнее приближалась к заданному значению.
Вот пример с нелинейным выводом показаний:
Вы можете поиграть с коэффициентами. Этот же принцип используется при выводе громкости сигнала, например, у любого аналогового индикатора: стрелки, полоски, яркость, цвет, размер итп. Приведённый пример самый простой, но и не самый красивый. Предлагайте ваши варианты в комментариях.
Цифры
С цифрами всё намного сложнее. Быстрые изменения показаний приводят к тому, что несколько порядков сливаются в мутное пятно. Для скорости, как и писал выше, можно задать интервал раз в секунду и глаз успеет прочитать три цифры.
В мототехнике не зря делают аналоговые индикаторы оборотов, точные цифры не нужны, важна относительная близость к оборотам максимального крутящего момента, к максимальным вообще и холостые.
Я предлагаю менять частоту вывода информации на дисплей в зависимости от степени изменения величины. Если обороты меняются, скажем, на 5% от последнего подсчёта, а не показа — можно затупить и показывать раз в 300-500мс. Если на 20%, то показывать раз в 100мс.
Можно огрубить шкалу и показывать только две значащие цифры
С учётом мототематики, можно довольно точно показывать обороты холостого хода как описано чуть выше и огрублять вывод на оборотах от двух холостых. На высоких оборотах для гонщиков важнее делать блинкеры типа "передачу вниз", "передачу вверх" и "ты спалишь движок". То есть держать двигатель около максимального крутящего момента и не дать ему крутиться выше максимальных разрешённых оборотов. Блинкеры замечательно делаются с помощью SmartDelay когда можно унаследовать от этого класса свой с заданной ногой контроллера и частотой мигания, там есть методы для переопределения и они вызываются раз в заданное время.

Здравствуй, Хабр! Мне хотелось бы поделиться историей о создании велокопомпьютера своими руками. После покупки велосипеда я решил как-то фиксировать свой прогресс, но мобильные трекеры оказались не самым удобным решением, а из Китая ко мне уже летел заранее заказанный там BOGEER 823, что делало покупку на месте бессмысленной. Поэтому я решил попытаться сделать велокомп своими руками, заодно заложив в него основу для расширения: управление обвесом велосипеда (передний и задний свет, звонок).
Немного подготовки
Первая версия
- Текущая скорость
- Дистанция текущей поездки
- Дистанция всех поездок
- Время в поездке
- Текущее время
- Подсветка
- Возможность обмена данным с компьютером через карту памяти
К счастью, все нужные модули были под рукой:
- Arduino nano
- Nokia 5110 LCD (синяя подсветка, через GND)
- Распаянные часы DS1302
- Модуль SD карт


Подключив геркон, я начал тестировать первую версию скетча, который базировался на раздобытых из сети скетча для работы с дисплеем и англоязычном спидометре.

Убедившись в работоспособности конструкции, я решил провести первый тест. Питание я планировал от нескольких АА батареек или аккумулятора, но в тот момент под рукой их не оказалось… Поверьте, кататься на велосипеде с ноутбуком под мышкой то ещё удовольствие.
Угадайте, почему не велосипед не едет назад?
Тестирование принесло свои плоды. Я обнаружил ошибку в логике: сигнал от геркона всегда приравнивался к обороту колеса (если прошло минимальное время на оборот). Вроде, всё правильно, но если остановиться, зафиксировав магнит напротив геркона, то программа считала, что вы едете очень быстро.
Вторая версия
Так как мой 5110-й был на красной подложке, а значит, подсветка в нём управлялась логическим нулём, а не единицей, от программного управления через аналоговый порт пришлось отказаться и добавить простую кнопку.
Кроме того, аналоговый порт без данных выдавал случайные значения, но это решилось простым резистором. А вот другой сюрприз от аналогового порта заставил меня поломать голову: значение замыкания геркона при питании от батареек были не такими, как при использовании USB порта.





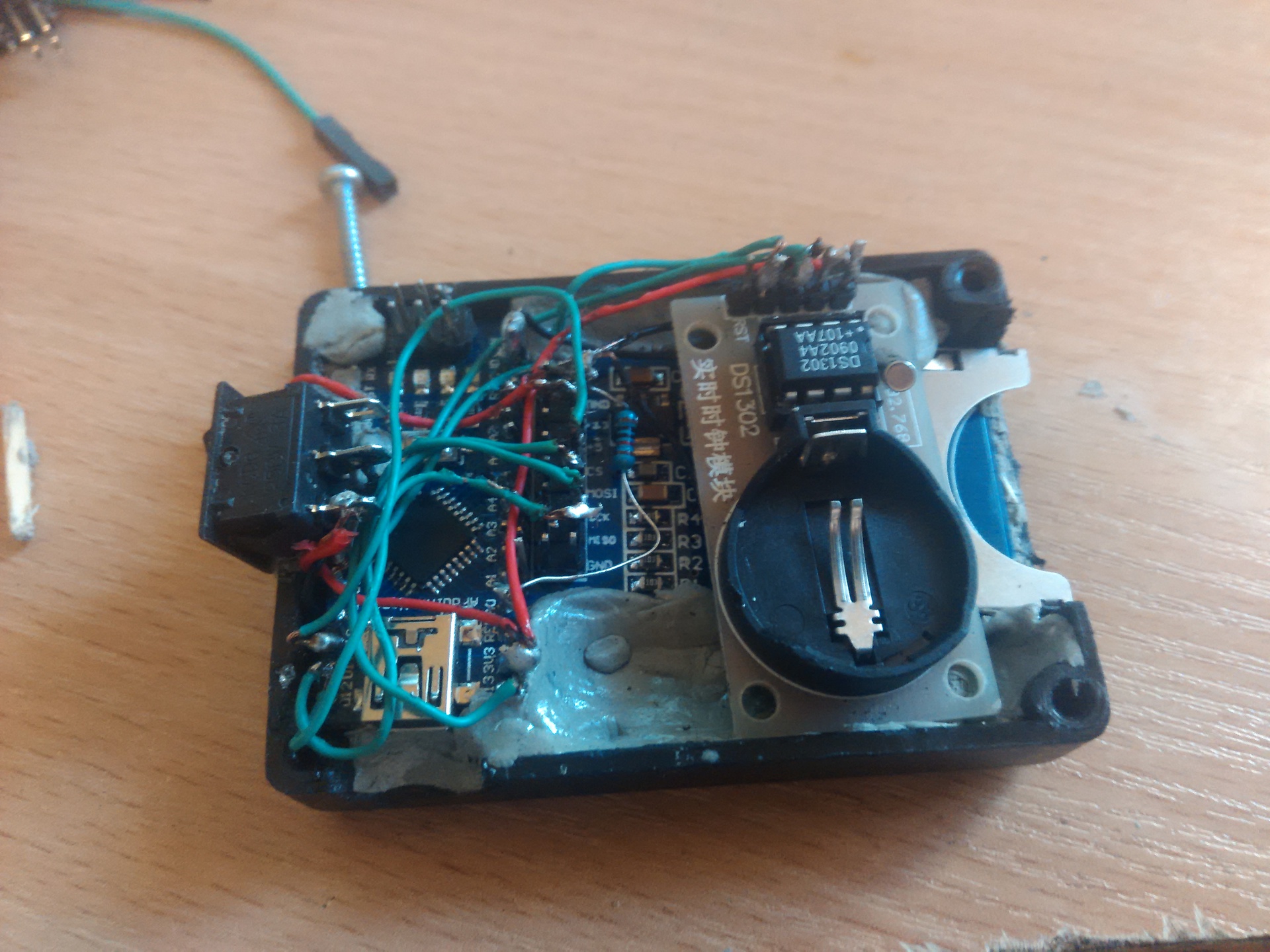
Третья версия

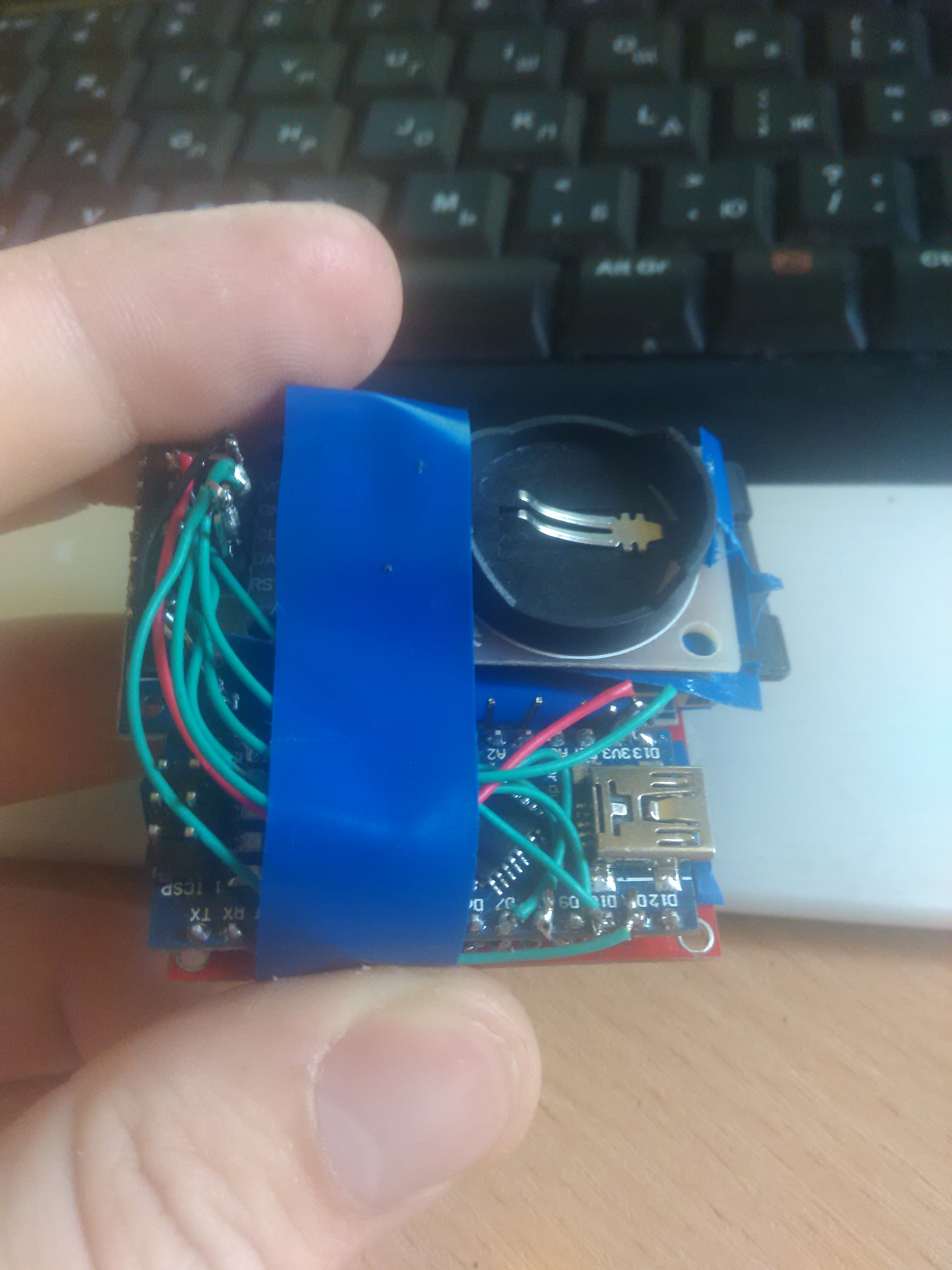
Пришлось изменить расположение компонентов: в корпус всё влезло, но итоговый размер стал больше. В процессе перепайки пришлось заменить Arduino Nano и SD модуль: паяльником я владею так себе и часть выводов просто привёл в негодность.
Размеры: 72x50x28mm





После того, как я проверил работоспособность всех модулей, я решил зафиксировать их эпоксидным клеем для большей устойчивости к тряскам.




Ещё пара исправлений в коде, и интерфейс был приведён к финальному (на текущий момент) виду.
Неприятность преподнесли часы: один из контактов отошёл, и время стало скакать (как если бы я перепутал RST и CLK). Но что самое интересное — после поездки часы пришли в норму.
Пожалуй, претензию можно предъявить к углу крепления: во время поездки смотреть неудобно.

Да и способ крепления изолентой неидеален, но у меня не получилось найти отдельно кронштейн для велосипедных гаджетов. Хотя, из Китая ко мне едет паучок. Думаю, что он вполне подойдёт для решения данной проблемы.






Стоимость
- Корпус BOX-G020 — 115р
- Эпоксилин — 95р
- Батарейки — 60р
- Arduino Nano — 120р
- Nokia LCD 5110 — 102р
- Чёрная изолента — 40р
- SD module — 187р
- DS1302 — 70р
- Кейсы для батареек — 120р
- Провода и резисторы — 80р
- Геркон + магнит — 82р
Итого: ~1100р
Ссылки по теме
Итоги

Как я уже писал, после установки в машину бортового компьютера Multitronics VC731, у меня возникла необходимость откалибровать его. Для этого нужно было проехать некоторое, точно известное расстояние, и ввести его в бортовик, после чего он произведет нужные расчеты и калибровку пробега и мгновенной скорости.
Для точного измерения пройденного пути я сразу подумал использовать GPS. Наивно полагая, что все получится, я установил в свой смартфон HTC Desire HD программу-логгер маршрута GPS и поехал.
После поездки, скинув информацию со смарта на комп, я был удивлен, насколько некачественно встроенный GPS приемник определяет свое местоположение. Маленькая частота обновлений координат и слабая антенна привели к тому, что даже в местах, где я двигался прямолинейно, со скоростью около 50 км/час, записанный трек выглядел как ломаная линия, а порой попадались восьмерки (вроде как я разворачивался и вдруг ехал назад, после чего снова разворот). В целом, конечно маршрут и измеренный пробег были примерно похожи на правду, но для калибровки бортовика такие измерения использовать я не мог.
Поразмышляв немного на эту тему, я пришел к выводу, что соберу-ка я сам GPS спидометр-одометр (далее девайс).
Это позволит убить массу зайцев одним выстрелом: откалибровать бортовик, познать азы работы с GPS приемниками, координатами и сопутствующими расчетами, ну и наконец, пощупать вживую известную платформу Arduino – именно на ней планировалось построить девайс.
По поводу Arduino – платформа известная, раскрученная, доступная, дешевая и удобная для использования. При этом обладает одним недостатком – среда разработки просто отвратительна. Она годится для детей и подростков, желающих познакомиться с программированием микропроцессоров, но никак для серьезной работы. К отсутствию массы, привычных в нормальных средах разработки, возможностей, можно добавить еще и омерзительный внешний вид нативной среды разработки для Arduino. Тем не менее, на момент постройки устройства я всего этого не знал, и потому программа писалась именно в этой среде.
Забегая вперед скажу, что я стал часто использовать борды Arduino в своих проектах, но программы стал писать в своем любимом компиляторе CodeVisionAVR, и заливаю ее в Arduino с помощью разработанной мной утилиты, встраиваемой в интерфейс компилятора. Я напишу отдельную статью касательно этого вопроса в ближайшем будущем.
Ну, вернемся к нашим баранам. Сердцем прибора стал борт Arduino Uno:

В качестве приемника GPS я использовал борд SparkFun основанный на чипе Venus638FLPx:
Приемник замечательный. Из основных достоинств могу отметить его 65 канальную архитектуру, широкий диапазон напряжений питания, возможность подключения резервного питания (что обеспечить быстрый старт при возобновлении основного питания), высокую частоту обновлений координат (до 20 Гц) и т.д.
Кроме того, приемник поддерживает подключение внешнего супер-конденсатора, который позволяет поддерживать напряжение в памяти приемника в течение многих часов. В результате, при повторном включении определение местоположения занимает считаные секунды.
Для индикации измерений использовался обычный экран 16×2:
Кроме того, раз уж пошла такая пьянка, в систему был добавлен Bluetooth передатчик HC-05 (pinout):

По нему, всю информацию, полученную от GPS приемника, планировалось переправлять как есть, что позволило бы использовать девайс в качестве внешнего GPS приемника для смартфона или ноутбука.
Сам модуль HC-05 доступен по цене 5-7 долларов за штуку и продается везде. К сожалению, работа с ним полна геморроя, потому как выпускает эти модули нынче каждый третий китаец, и делают они их все немного по разному, так, что найти 100%-но соответствующий даташит нереально. В итоге Bluetooth передатчик получается нормально запустить и настроить после нескольких циклов проб и ошибок.
Важно отметить, что для работы передатчика важно подтянуть к питанию ноги reset и wake-up, а также подсоединить к земле все GND.


Ну и наконец – антенна, первая, что попалась под руку:

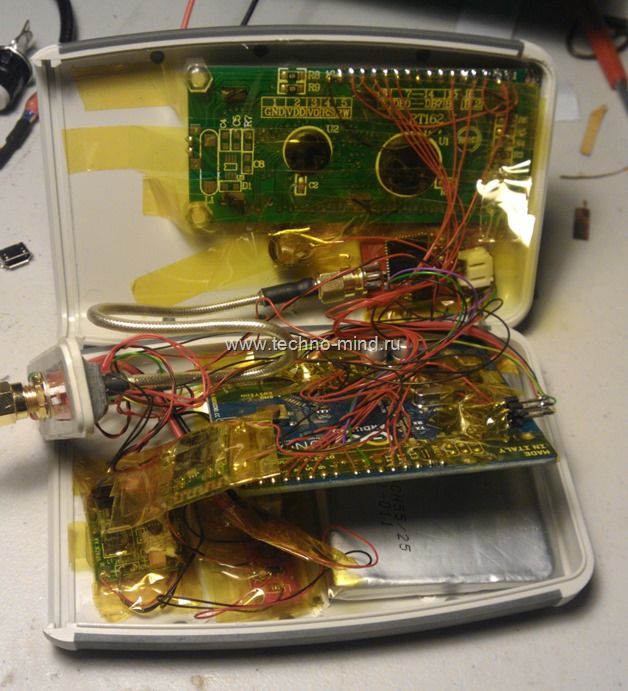
Все вышеназванные детали были соединены вот таким образом (надеюсь, я не ошибся – девайс строился на лету, так что схему я рисовал по памяти):

В итоге из рассыпухи break-up бордов получилась вот такая лапша:

После того, как девайс был готов, была написана прошивка, последнюю версию которой можно сказать здесь.
Кратенько о прошивке.
Как только это произойдет, они тут же высветятся на экране, вместе с текущей скоростью и азимутом движения.
Левой кнопкой можно менять режим отображения данных на экране. Возможности:
Длительным нажатием на правую кнопку можно обнулить одометр.
Девайс постоянно мониторит напряжение батареи, и как только оно упадет ниже 3.2 вольт, девайс перейдет в режим отображения напряжения на экране. При этом перейти на другой экран станет невозможно.

Подсчет пройденного расстояния производится по методу Great Circle distance calculation – HAVERSINE. В силу специфики гражданского GPS, измерения пробега получаются наиболее точными при движении по трассе. Хотя с хорошей антенной и в городе точность получается довольно точными. При контрольной проверке по карте, погрешность составила пару сотен метров на 50 километров пути.
Передача данных по Bluetooth осуществляется параллельно основной работе девайса, и может быть полезна, к примеру, пользователям смартфонов на Android. Точность и чувствительность девайса в разы лучше оных на встроенном в смартфон GPS модуле, и потому, при помощи бесплатной программы Bluetooth GPS можно заставить все остальные программы, пользующиеся GPS для работы использовать данные приходящие по Bluetooth, вместо данных со встроенной антенны.
Кроме того, вместо телефона к Bluetooth можно подключить компьютер и пользоваться им в качестве инструмента для записи и анализа маршрута, в том числе в реальном времени.
После окончательной сборки и проверка девайса, я смог, наконец, с большой точностью откалибровать свой Multitronics.
Теперь активно пользую девайс при путешествиях на джипах по бездорожью – удобно измерять пройденные расстояния, чтобы не сбиться с маршрута.
Читайте также: