
4wd full time принцип работы toyota
Добавил пользователь Валентин П. Обновлено: 19.09.2024
И все таки вернемся к ссылкам:)))))
Блокировка:
центральный - гидромеханическая муфта с электронным управлением.
На машинах семейств Corolla, Corona, Camry-Vista и RAV4 10 применялась блокировка межосевого дифференциала многодисковой гидромеханической муфтой с электронным управлением (схема STD I).
Нажатие кнопки "C.DIFF AUTO" на панели разрешает блоку управления автоматически выбирать коэффициент блокировки в зависимости от условий движения (при полной блокировке усилие принудительно будет почти поровну делиться между осями), при отжатой кнопке межосевой дифференциал остается постоянно свободным.
Номинальным для повседневной езды является именно автоматический режим, его отключение предусматривается только при буксировке машины или использовании запаски-докатки. Максимальный коэффициент блокировки реализуется системой управления при положениях селектора "L" и "R".
На большинстве моделей с коробкой A540H, выпущенных после 1994 г., кнопка "C.DIFF AUTO" отсутствует - водитель полностью отстранен от управления блокировкой и автоматический режим задействован постоянно.
Я конечно уважаю ФАК а также любую RTFM, но сидя за рулем я руководствуюсь следующим правилом: на панели приборов при движении должно гореть минимум лампочек, зеленые лампочки могут гореть, оранжевые могут гореть, но лучше не надо, красные лапмочки не должны гореть никогда.
Full time - ПОСТОЯННЫЙ полный привод. Т.Е. в твоем случае при движении по ПРЯМОЙ у тебя за счет центрального ДИФФЕРЕНЦИАЛА работает и передний и задний мост, т.е. ОДНО переднее и ОДНО заднее колесо, но только до тех пор, пока не изменится нагрузка на один из мостов (читай - колес). Для тех. кто не в курсе: задача ДИФФЕРЕНЦИАЛА перераспределять крутящий момент от БОЛЕЕ нагруженного колеса к менее нагруженному, по-этому если, предположим, ОДНО переднее колесо вывесить на домкрате, то максимальная нагрузка придется на задний мост и центральный дифференциал перераспределит ее на передний, а дифференциал переднего моста заставит крутиться ОДНО вывешенное колесо - т.е. машина не двинется. Для того, чтобы заставить работать все колеса и существует Блокировка дифф. В случае FULL TIME кнопка C.DIFFLOCK отключает перераспределение нагрузки между мостами и заставляет работать их независимо друг от друга. Назвать это "подключением заднего моста " было бы некорректно, поскольку он и так подключен, просто через дифференциал.
Согласен с BDT. Тоже думаю, что уж если кнопка есть, то она есть что-бы ее НАЖИМАТЬ и ОТЖИМАТЬ по необходимости :), т.е. не держать нажатой/включеной постоянно.
А если бы надо было ЧТО-ТО ИНОГДА, В ОТДЕЛЬНЫХ СЛУЧАЯХ ОТКЛЮЧАТЬ, как говорится в ФАКе, то логичней было бы сделать кнопку DIFF OFF.
Ну а вообще, про "подключение переднего/заднего моста" и т.д. - не забывайте, что в мостах есть еще межколесный диф. И если вы одно заднее, к примеру, колесо провалите в яму, то скорее всего у нас противоположное (по диагонали) колесо ослабит сцепление с землей. И будут они оба буксовать :)
Т.е. это конечно четко на льду (до сих пор балдею, как вспомню как в этом году первый снег когда выпал, выезжаю с работы, а улица под уклон идет. И ВНИЗ полоса вся забита, стоят. А на другой, которая наверх идет - ПУСТОТА :)) Только пара машин стоят развернутые, буксуют. И я типа так спокойненько вырулил, поехал. красота :) Правда, резина была зимняя, с прошлого года не снимал :) ), но если ляжете на пузо или, как я уже сказал, колеса "вывесите", то пиндыр - приплыли :)
пешеходЪ:
" в твоем случае при движении по ПРЯМОЙ у тебя за счет центрального ДИФФЕРЕНЦИАЛА работает и передний и задний мост, т.е. ОДНО переднее и ОДНО заднее колесо, но только до тех пор, пока не изменится нагрузка на один из мостов (читай - колес). Для тех. кто не в курсе: задача ДИФФЕРЕНЦИАЛА перераспределять крутящий момент от БОЛЕЕ нагруженного колеса к менее нагруженному"
на оба колеса на ведущей оси со свободным дифом момент идет. Другое дело что когда одно вывешено то на второе идет стоко же скоко нужно для вращения вывешенного те почти ничего. Задача диффернциала - дать возможность колесам с разной скоростью вращаться, а уж перераспределение момента это свойство, особенность.
Ну при чем тут ФАК? В оригинальном японском руководстве японским языком написано дословно: ПОЖАЛУЙСТА, НЕ ВЫКЛЮЧАЙТЕ КНОПКУ C.DIFF.AUTO ПРИ ПОВСЕДНЕВНОЙ ЕЗДЕ.
Это многократно переводилось и писалось в этом форуме.
Впрочем, дело хозяйское - насильно никто не заставляет.
Перейти на новый Форум Toyota
Форум Toyota
Toyota - Nissan - Mitsubishi - Honda - Mazda - Subaru - Suzuki - Isuzu - Daihatsu
1990 - 1991 - 1992 - 1993 - 1994 - 1995 - 1996 - 1997 - 1998 - 1999 - 2000 - 2001 - 2002 - 2003 - 2004 - 2005 - 2006 - 2007 - 2008 - 2009 - 2010 - 2011 - 2012 - 2013 - 2014 - 2015 - 2016 - 2017 - 2018 - 2019 - 2020 - 2021 - 2022

Всем драйвовчанам мое почтение, в сети много вопросов можно ли на современных от Toyota — 4вд ака FullTime использовать вместо полноценной запаски на пробитое колесо, так называемую "докатку" или "банан" с отличным диаметром и высотой от стоявших на авто. И прежде чем ставить в замену пробитого колеса -"банан" с меньшими или большими характеристиками (диаметр- высота) рекомендую ознакомится с принципом работы разных систем 4wd.
На автомобилях Toyota основными схемами реализации полного привода в виде:
— Исходно-переднеприводные модели с АКПП/CVT;
— Исходно-заднеприводные модели с АКПП;
— Исходно-переднеприводные модели с МКПП.
Мы рассмотрим наиболее нас интересующую исходно-переднеприводные модели с АКПП/CVT со всеми остальными схемами реализации можно ознакомиться на toyota-club.
1. Постоянный полный привод.
На таком приводе используются схемы STD I, STD II, VSC+
Схема STD I:
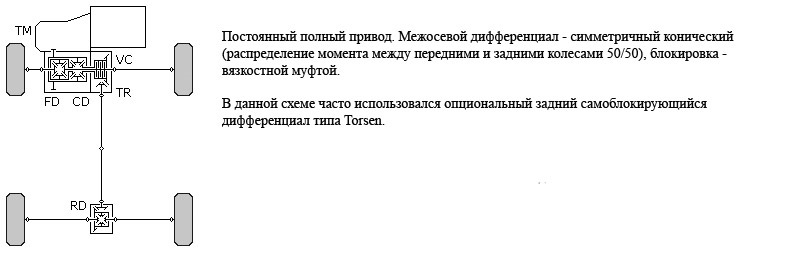
Постоянный полный привод. Межосевой дифференциал — симметричный конический (распределение момента между передними и задними колесами 50/50), блокировка — многодисковой гидромеханической муфтой.
A241H — коробка передач с простым гидравлическим управлением и контроль блокировки в ней достаточно примитивен, тогда как в более совершенной A540H реализовано полноценное электронное управление с обратной связью.
Максимальный коэффициент блокировки реализуется системой управления в диапазонах "L" и "R".

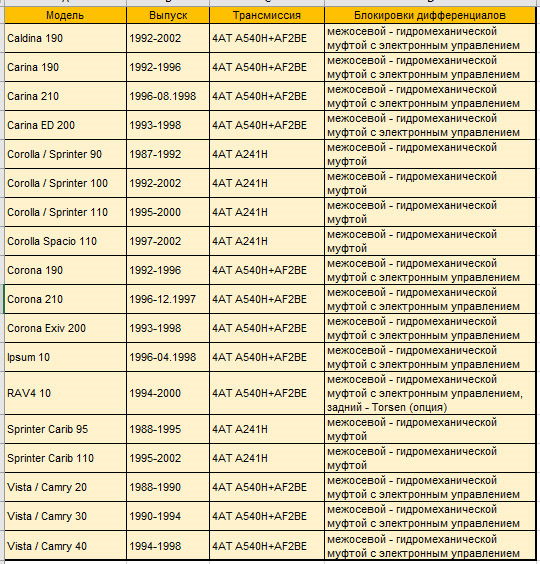
Схема STD II:
2. Подключаемый полный привод
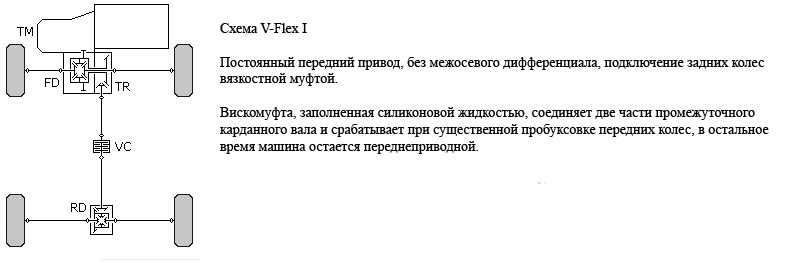
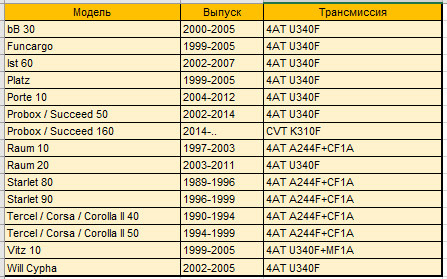
Схема V-Flex II
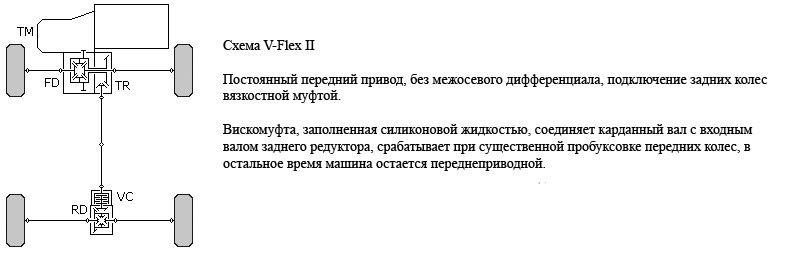
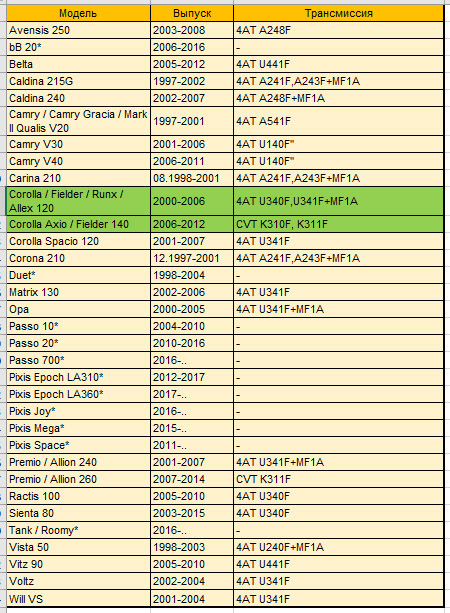
Схема ATC (DTC)

3. Электрический полный привод
Схем E-4WD (E-Four)

Развитие, эффективность, надежность
Отсчет времени для тойотовского 4WD на исходно-переднеприводных машинах можно вести с 1988 года.
Схема STD I, появившаяся в самые "тучные годы" японского автомобилестроения, так и осталась наиболее совершенной, надежной и эффективной среди всех вариаций полного привода легковых тойот. Этот "Full-Time 4WD" действительно был постоянным, полным и, что немаловажно, строился на базе беспроблемных и выносливых автоматических коробок. Единственный принципиальный недостаток (по современным меркам) — это отсутствие каких-либо межколесных блокировок, что делает машины чувствительными к условному диагональному вывешиванию. К сожалению, выпуск последних моделей с STD I завершился еще в 2002 году.
Для моделей самого младшего B-класса тойотовцы ограничились подключаемым полным приводом по схеме V-Flex I и придерживались этой концепции с конца 1980-х вплоть до 2010-х. В настоящее время схема применяется на единственной, утилитарной модели Toyota.
Затяжной кризис 1990-х сделал новым трендом тотальную экономию — на материалах, на полезных опциях, и, конечно же, на совершенстве конструкций. Для тойотовского 4WD перелом наступил после 1997-го — с запуском и массовым внедрением схемы V-Flex II одна из самых продвинутых систем менялась на самую примитивную. Ее врожденные недостатки общеизвестны:
— запаздывающее "срабатывание" вискомуфты,
— ограниченная степень блокировки,
— потенциальная опасность при активной езде,
— низкая долговечность самой муфты.
Разумеется, даже такой сомнительный 4WD оставался предпочтительнее монопривода, но проблема в том, что опытным тойотовладельцам было с чем его сравнивать. После 2015-го на собственных тойотовских разработках V-Flex II больше не применяется, оставаясь атрибутом только ребейджинговых моделей Daihatsu.
Для только набиравшего в то время обороты класса паркетников/кроссоверов тойотовцы сохранили постоянный полный привод в максимально упрощенном варианте (STD II), который фактически позаимствовали у прежних моделей с механическими коробками (разве что поместив в межосевой дифференциал пять сателлитов вместо четырех). Ожидаемо низкая эффективность вязкостных муфт по сравнению с гидромеханическими отразилась на эксплуатационных характеристиках и в этом случае.
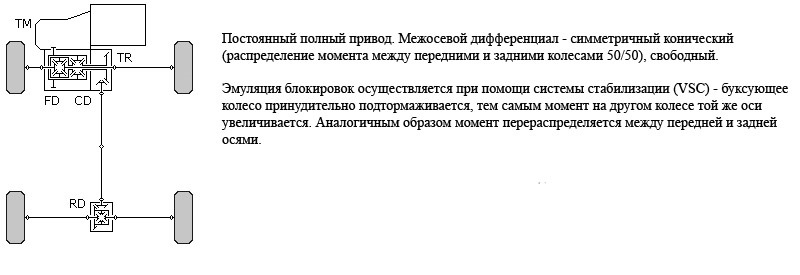
К середине 2000-х развитие технологий позволило полностью отказаться от вискомуфт, оставив все три дифференциала свободными (VSC+) — теперь блокировки эмулировались с помощью тормозной системы. Такое решение оставалось в производстве не слишком долго и уже спустя поколение все паркетники получили полный привод типа ATC.
Вообще, с активным внедрением систем стабилизации (у японских марок — со второй половины 2000-х) и появлением эмуляции блокировок межколесных дифференциалов с помощью тормозов, в мире начался новый этап развития полного привода. У некоторых производителей связка подключаемого 4WD и ESP дает лучший эффект, чем даже некоторые варианты классического постоянного полного привода с излишне "мягкой" блокировкой центра или ее эмуляцией. Но не в случае Toyota — сравнивая реальное поведение современных паркетников разных марок нужно признать — тойотовские настройки подключаемого полного привода и эмуляции межколесных блокировок являются крайне неудачными.
Не лучшим образом отразился на возможностях полного привода отказ от автоматов в пользу вариаторов, постепенно идущий с середины 2000-х (моноприводные версии получали их еще раньше). Если для легких машин младших классов это не так принципиально, то для минивэнов и, тем более, кроссоверов именно вариатор становится наиболее узким, уязвимым и дорогим местом в цепи передачи мощности от двигателя к колесам.
Еще один тип условно полного привода, известный еще с 2001-го, сформировали многочисленные гибридные модели (E-4WD). При внешней заманчивости идеи, красивых цифрах и графиках крутящего момента заднего электромотора, в реальности тяговые возможности не оправдали ожиданий — по эффективности E-4WD не дотягивает даже до ATC аналогичных не-гибридных моделей.
Если брать наши филдера, то исходя из вышенаписаного разный диаметр у колес негативно скажеться на всей системе 4wd в целом. Берегите себя и свои автомобили.
Всем ровных дорог.
UPD: Из руководства по эксплуатации выяснилось что использование докатки/банана/аварийного колеса на 4WD может не только привести к сбоям но и окончательно вывести её (систему) из строя. Во всем виной разница диаметров колес и соответственно разное количество оборотов у аварийного колеса по соотношению к обычным. Электроника думает что происходит пробуксовка и подключает муфту, которая от долгой работы в итоге перегревается и выходит из строя.
Чем больше на улице снега, тем охотнее покупают полноприводные машины. Но полный привод полному рознь: типов 4WD много, и они существенно отличаются друг от друга. Что нужно знать о своей полноприводной машине? И какой полный привод лучше? Особенности работы 4WD — в нашем обзоре.
Полный привод обычно разделяют на постоянный и подключаемый, но такая строгая классификация слегка устарела: сегодня работой 4WD зачастую заведует электроника, делая машину то моноприводной (то есть с одной ведущей осью), то полноприводной, в зависимости от ситуации. Зато у автомобилистов в ходу понятие честный полный привод (другой, менее распространённый термин — дифференциальный полный привод). К честным относят схемы, в которых на ведущие колёса стабильно приходит тяга, вне зависимости от работы различных муфт и электронных систем. С них и начнём.

Part-time 4WD: жёстко подключаемый полный привод
Схему part-time называют жёсткой, поскольку при включении 4WD передняя и задняя оси машины связаны напрямую, без дифференциала. О конструкции дифференциала и его роли в автомобиле лучшее видео сняли в General Motors ещё в 1937 году. Оно настолько наглядно, что не требует перевода. Насладитесь довоенным отсутствием компьютерной графики:
Плюсы и минусы part-time 4WD
✅ Простота и надёжность.
✅ Возможность отключать 4WD для экономии топлива.
⛔ Ограничения использования на твёрдых покрытиях.
⛔ Ухудшение управляемости в режиме 4WD.

Full-time 4WD: постоянный полный привод

Плюсы и минусы full-time 4WD
✅ Простота и надёжность.
✅ Возможность ездить на 4WD по любым покрытиям.
⛔ Необходимость блокировки межосевого дифференциала.
⛔ Повышенный расход топлива.

Селективный (отключаемый) полный привод
Идеальный полный привод? Возможно — до тех пор, пока всё работает исправно. Большое количество режимов усложнило конструкцию, и со временем неизбежны проблемы с датчиками, контроллерами, актуаторами и прочими деталями этой, безусловно, продвинутой системы 4WD.
Плюсы и минусы селективного 4WD
✅ Возможность отключать 4WD для экономии топлива.
✅ Возможность ездить на 4WD по любым покрытиям.
⛔ Переусложнение конструкции, возможность отказов.

Автоматически подключаемый полный привод (AWD)
Нужно признать, что системы AWD прогрессируют, активно изживая детские болезни прошлых лет, за которые многие автомобилисты их до сих пор не любят. В продвинутых системах запаздывания подключения 4WD свели на нет, постоянно подводя 5–10% тяги на задние колёса. Умная электроника сама выбирает подходящий режим, оптимально распределяя крутящий момент между осями. А отключение полного привода, когда он не нужен, ощутимо экономит топливо.
Плюсы и минусы автоматически подключаемого AWD
✅ Работа в автоматическом режиме без вмешательства водителя.
✅ Автоматическое отключение 4WD для экономии топлива.
⛔ Отказы и перегрев муфт при активном буксовании.
⛔ Невозможность использования на серьёзном бездорожье.

Режимы 4WD
Режимы полноприводной трансмиссии
2H / 2WD / FWD /
RWD
Моноприводный режим: 4WD выключено, тяга идёт только на одну ось автомобиля. Используется на сухих дорогах с твёрдым покрытием, позволяет экономить топливо.
AUTO
Автоматический режим. В большинстве ситуаций автомобиль останется моноприводным, но при необходимости электроника подключит 4WD.
4H / 4HI / 4WD
Стандартный режим полного привода. Используется на плохих или скользких дорогах для улучшения проходимости и курсовой устойчивости.
4HLC / C. DIFF LOCK
Блокировка межосевого дифференциала. Используется при преодолении трудных участков для повышения проходимости. На твёрдых покрытиях режим должен быть выключен.
4L / LOW
Понижающая передача (демультипликатор). Используется для получения максимального крутящего момента при выезде из трудных участков. Также может помочь при крутых спусках и подъёмах.
Важно: переключение в этот режим и обратно обычно требует полной остановки машины и перевода КПП в нейтраль.
REAR DIFF LOCK / RR DIFF LOCK
Блокировка заднего межколёсного дифференциала. Используется при преодолении сложных участков на бездорожье.
FRONT DIFF LOCK / FR DIFF LOCK
Блокировка переднего межколёсного дифференциала. Используется при преодолении сложных участков на бездорожье.
Важно: в этом режиме рекомендуется двигаться только по прямой, не выворачивая руль.
Также всем владельцам машин с отключаемым полным приводом (part-time и селективным) рекомендуется ежемесячно проезжать минимум 16 км в режиме 4WD для смазывания всех узлов трансмиссии.

Когда появился полный привод? Какие его виды нам известны? Каковы принципы и механизмы его работы? В чем основные отличия? Какие плюсы и минусы есть у разных конструкций? Какая из них наиболее распространена? Как привод на четыре колеса реализован на гибридах и электромобилях? Обо всем этом — и не только! — в сегодняшнем материале Дрома.
Краткий экскурс в историю
История создания полноприводных автомобилей началась еще в конце XIX века, и мы просто обязаны для полноты картины обозначить некоторые ключевые в этом направлении модели. Но мы намеренно опустим все то, что связано с грузовиками — нам все же гораздо интереснее и ближе легковые машины. А также не станем в исторической части касаться самого простого вида полного привода — part-time с жестким подключением, потому что тут и рассказывать особо нечего: самый неприхотливый и надежный, в наше время он используется только на пикапах и настоящих внедорожниках.





Зачем?
Почему вообще возникла задача приводить в движение все четыре колеса легкового автомобиля? Во-первых, полный привод позволяет гораздо эффективнее — с большим актуальным пятном контакта шин и меньшей пробуксовкой — использовать мощность силовой установки. Во-вторых, немаловажным фактором всегда было улучшение проходимости внедорожной техники. В-третьих, привод 4WD обеспечивает большую устойчивость автомобиля в поворотах, особенно на скользких покрытиях, и, как следствие, высокий уровень безопасности. И в-четвертых, полный привод дает водителю еще один инструмент управления, кроме традиционных руля и педалей: варьируя уровень момента на осях, можно менять характер машины — от склонного к недостаточной поворачиваемости до, наоборот, заднеприводного. Отрицательными факторами принято считать лишний вес, сложность конструкции и повышенный расход топлива.
Как работает?






Виды полного привода и их особенности. Плюсы и минусы
Part-time 4WD
Жестко подключаемый полный привод
Наиболее простой и надежной системой полного привода принято считать жестко подключаемый 4WD, или part-time. Из-за своей простоты и утилитарности такая версия чаще всего встречается на грузовиках, утилитарных внедорожниках или пикапах. В настоящее время — поистине вымирающий вид.

Примеры моделей автомобилей: Toyota Hilux, УАЗ, Jeep Wrangler, Nissan Patrol (до 2010 г.), Suzuki Jimny.



Плюсы и минусы part-time:
Full-time 4WD
Постоянный полный привод
Если автомобиль с постоянным полным приводом, то сделать его моноприводным никак не получится. Ведь между осями здесь уже имеется центральный дифференциал, а крутящий момент всегда приходит на все четыре колеса, хотя и в разных пропорциях.

Примеры моделей автомобилей: Toyota RAV4 (I & II Gen), Subaru VTD, VW Touareg, Land Rover Discovery, Toyota Land Cruiser (начиная с 80-го).



Плюсы и минусы full-time:
Selective 4WD
Отключаемый полный привод
Суть селективного привода — в объединении преимуществ двух систем 4WD, о которых мы говорили выше: part-time и full-time. Другая особенность — именно возможность отключения переднего привода, а не его подключения. Таким образом, автомобили, оснащенные подобного рода системами, изначально полноприводные, но могут передвигаться только на заднем приводе для экономии топлива. При этом полноприводный режим не имеет ограничений по роду покрытия и скорости. В то же время все они имеют возможность жесткой блокировки между осями, что и предполагает основную сферу использования — на полноценных внедорожниках и пикапах, например, Mitsubishi Pajero или L200, Toyota Sequoia, Jeep Grand Cherokee и Nissan Pathfinder. Зачастую подобные автомобили оснащаются еще и блокировкой заднего моста.

Виды подобных систем: Mitsubishi SuperSelect, Toyota Multi-Mode, Renault/Nissan All-Mode 4x4, Jeep SelecTrac.



Плюсы и минусы Selective AWD:
Automatic AWD, или TOD (Torque-On-Demand)
Автоматически подключаемый полный привод

Примеры моделей автомобилей: Subaru Active AWD, Toyota RAV4, KIA Sportage, Volkswagen Tiguan, Hyundai Creta.



Плюсы и минусы Automatic AWD:
AWD с активными или (само)блокирующимися дифференциалами на осях
Основным отличием данного рода систем является наличие возможности блокировки (полной или частичной) межколесных дифференциалов, а также электронное управление скоростью вращения колес одной оси. Жесткие блокировки нужны в мостах для значительного улучшения проходимости в условиях серьезного бездорожья. Недаром такая схема (с тремя блокировками) долго использовалась на Mercedes-Benz G-класса (до последнего поколения), а внедорожные тюнеры частенько оснащают блокировками те джипы, в которых с завода такой возможности не предусмотрено. Нужно помнить, что наличие блокировок требует усиления мостов или приводов, а также очень аккуратного использования на бездорожье.

Subaru WRX STI — единственный на данный момент легковой (не внедорожник) серийный автомобиль в мире с тремя блокировками. Но его история другая: сделано это для улучшения управляемости, цепкости в поворотах и лучшей реализации крутящего момента на скользких покрытиях.
Примеры моделей автомобилей: Mercedes-Benz G-класса, Jeep Wrangler Rubicon, Subaru WRX STI, Acura MDX, Nissan GTR.



Плюсы и минусы активных дифференциалов:
Hybrid & Electro AWD
Полный привод гибридов и электромобилей

Примеры полноприводных гибридов: Lexus RX.
Примеры полноприводных электромобилей: Audi e-tron S, Tesla Model X, Lotus Evija.



Плюсы и минусы гибридного и электрического полного привода:
Мы надеемся, что этот материал оказался для вас полезным и интересным, а во второй части расскажем о самых известных системах полного привода, используемых на современных легковых автомобилях, кроссоверах и внедорожниках — 4MATIC, quattro, xDrive, ATESSA, SH-AWD, S-AWC и других. Совсем скоро на Дроме!
Краткий обзор основных схем реализации полного привода на автомобилях Toyota начнем с наиболее массового варианта - с поперечным расположением двигателя и автоматической трансмиссией.
| 1.1. Постоянный полный привод |
| 1.1.1. Схема STD I |
 |
A241H - коробка передач с простым гидравлическим управлением и контроль блокировки в ней достаточно примитивен (подробное описание - "АКПП A241H"), тогда как в более совершенной A540H реализовано полноценное электронное управление с обратной связью (подробное описание - "АКПП A540H").
Максимальный коэффициент блокировки реализуется системой управления в диапазонах "L" и "R".
Номинальным для повседневной езды является именно автоматический режим, его отключение предусматривается только при буксировке машины или использовании запасного колеса-докатки (выдержка из инструкции).
| 1.1.2. Схема STD II |
 |
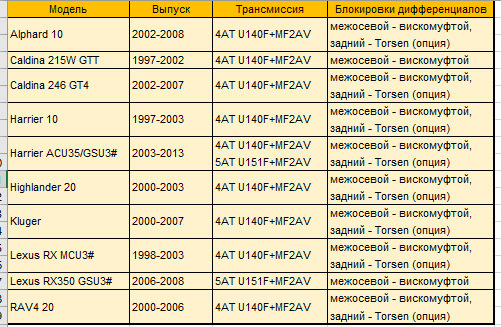
В данной схеме часто использовался опциональный задний самоблокирующийся дифференциал типа Torsen.
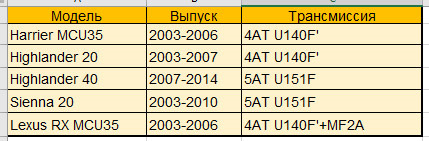
| 1.1.3. Схема VSC+ |
 |
Эмуляция блокировок осуществляется при помощи системы стабилизации (VSC) - буксующее колесо принудительно подтормаживается, тем самым момент на другом колесе той же оси увеличивается. Аналогичным образом момент перераспределяется между передней и задней осями.
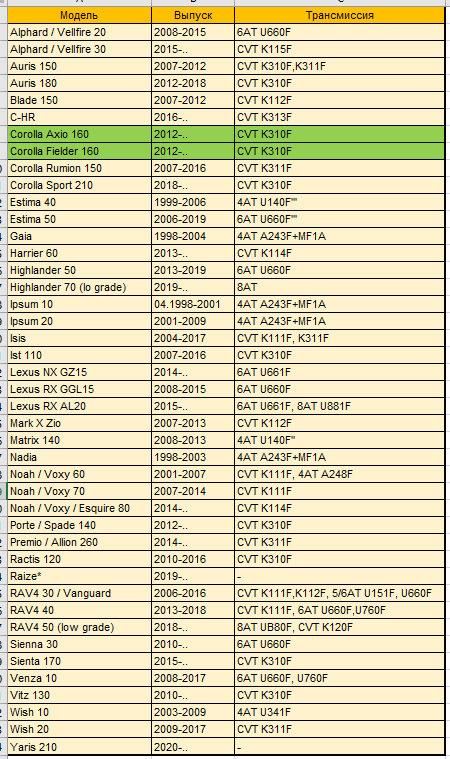
| Harrier MCU35 | 2003-2006 | 4AT U140F' |
| Highlander 20 | 2003-2007 | 4AT U140F' |
| Highlander 40 | 2007-2014 | 5AT U151F |
| Sienna 20 | 2003-2010 | 5AT U151F |
| Lexus RX MCU35 | 2003-2006 | 4AT U140F'+MF2A |
| 1.2. Подключаемый полный привод |
| 1.2.1.1. Схема Flex |
 |
Муфта RBC соединяет две части промежуточного карданного вала и срабатывает при пробуксовке передних колес, в остальное время машина остается переднеприводной.
| bB 30 | 2000-2005 | 4AT U340F |
| Funcargo | 1999-2005 | 4AT U340F |
| Ist 60 | 2002-2007 | 4AT U340F |
| Platz | 1999-2005 | 4AT U340F |
| Porte 10 | 2004-2012 | 4AT U340F |
| Raum 10 | 1997-2003 | 4AT A244F+CF1A |
| Raum 20 | 2003-2011 | 4AT U340F |
| Starlet 80 | 1989-1996 | 4AT A244F+CF1A |
| Starlet 90 | 1996-1999 | 4AT A244F+CF1A |
| Tercel / Corsa / Corolla II 40 | 1990-1994 | 4AT A244F+CF1A |
| Tercel / Corsa / Corolla II 50 | 1994-1999 | 4AT A244F+CF1A |
| Vitz 10 | 1999-2005 | 4AT U340F+MF1A |
| Will Cypha | 2002-2005 | 4AT U340F |
| 1.2.1.2. Схема V-Flex I |
 |
Вискомуфта соединяет две части промежуточного карданного вала и срабатывает при пробуксовке передних колес, в остальное время машина остается переднеприводной.
| Probox / Succeed 50 | 2002-2014 | 4AT U340F |
| Probox / Succeed 160 | 2014-.. | CVT K310F |
| 1.2.2. Схема V-Flex II |
 |
Вискомуфта, заполненная силиконовой жидкостью, соединяет карданный вал с входным валом заднего редуктора, срабатывает при существенной пробуксовке передних колес, в остальное время машина остается переднеприводной.
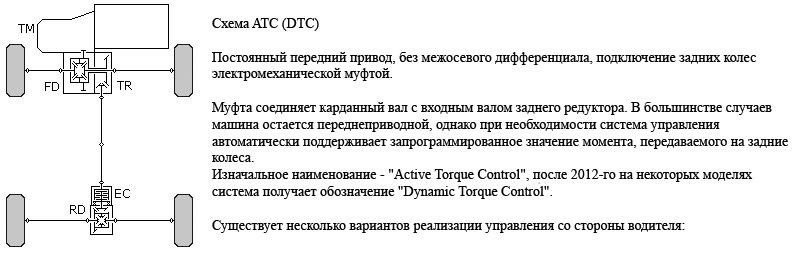
| 1.2.3. Схема ATC (DTC) |
 |
Муфта соединяет карданный вал с входным валом заднего редуктора. В большинстве случаев машина остается переднеприводной, однако при необходимости система управления автоматически поддерживает запрограммированное значение момента, передаваемого на задние колеса.
Изначальное наименование - "Active Torque Control", после 2012-го на некоторых моделях система получает обозначение "Dynamic Torque Control".
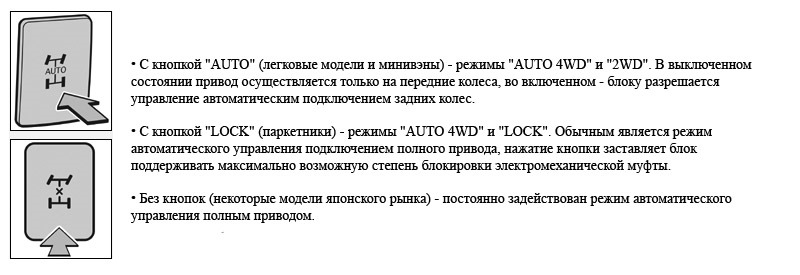
Существует несколько вариантов реализации управления со стороны водителя:
 |
 |
• С кнопкой "LOCK" (паркетники) - режимы "AUTO 4WD" и "LOCK". Обычным является режим автоматического управления подключением полного привода, нажатие кнопки заставляет блок поддерживать максимально возможную степень блокировки электромеханической муфты.
| 1.2.4. Схема DTV |
 |
Официальное наименование - "Dynamic Torque Vectoring AWD". В большинстве случаев машина остается переднеприводной, при необходимости система управления автоматически регулирует значение момента, передаваемого на каждое из задних колес. Кроме того, предусмотрено размыкание силовой передачи в раздаточной коробке и заднем редукторе, чтобы в режиме 2WD карданный вал и шестерни не вращались впустую.
| 1.2.5. Схема Part-Time |
 |

Самая первая и тупиковая ветвь развития переднего привода Toyota (с продольным расположением двигателя и трансмиссией под ним) породила и собственный вариант реализации 4WD. Управление подключением заднего моста - кнопкой на селекторе, исполнительный механизм - с вакуумным приводом.
| Sprinter Carib AL25 | 1983-1988 | 3AT |
| Tercel AL25 | 1984-1989 | 3AT |
| Corsa AL25 | 1984-1989 | 3AT |
| 1.3. Электрический полный привод |
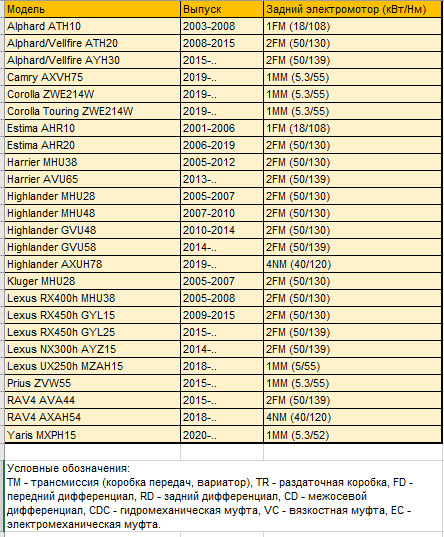
| 1.3.1. Схема E-4WD (E-Four) |
Постоянный передний привод, без механической связи между осями, подключаемый привод задних колес отдельным электродвигателем.
Применяются два типа задних силовых модулей с электродвигателем и редуктором - классический трехвальный (в нескольких вариантах мощности и крутящего момента) и компактный двухвальный с маломощным электромотором (HV4WD).
| Развитие, эффективность, надежность |
Отсчет времени для тойотовского 4WD на исходно-переднеприводных машинах можно вести с 1988 года.
Схема STD I, появившаяся в самые "тучные годы" японского автомобилестроения, так и осталась наиболее совершенной, надежной и эффективной среди всех вариаций полного привода легковых тойот. Этот "Full-Time 4WD" действительно был постоянным, полным и, что немаловажно, строился на базе беспроблемных и выносливых автоматических коробок. Единственный принципиальный недостаток (по современным меркам) - это отсутствие каких-либо межколесных блокировок, что делает машины чувствительными к условному диагональному вывешиванию. К сожалению, выпуск последних моделей с STD I завершился еще в 2002 году.
Для моделей самого младшего B-класса тойотовцы ограничились подключаемым полным приводом по схеме V-Flex I и придерживались этой концепции с конца 1980-х вплоть до 2010-х. В настоящее время схема применяется на единственной, утилитарной модели Toyota.
Затяжной кризис 1990-х сделал новым трендом тотальную экономию - на материалах, на полезных опциях, и, конечно же, на совершенстве конструкций. Для тойотовского 4WD перелом наступил после 1997-го - с запуском и массовым внедрением схемы V-Flex II одна из самых продвинутых систем менялась на самую примитивную. Ее врожденные недостатки общеизвестны:
- запаздывающее "срабатывание" вискомуфты,
- ограниченная степень блокировки,
- потенциальная опасность при активной езде,
- низкая долговечность самой муфты.
Разумеется, даже такой сомнительный 4WD оставался предпочтительнее монопривода, но проблема в том, что опытным тойотовладельцам было с чем его сравнивать. После 2015-го на собственных тойотовских разработках V-Flex II больше не применяется, оставаясь атрибутом только ребейджинговых моделей Daihatsu.
Для только набиравшего в то время обороты класса паркетников/кроссоверов тойотовцы сохранили постоянный полный привод в максимально упрощенном варианте (STD II), который фактически позаимствовали у прежних моделей с механическими коробками (разве что поместив в межосевой дифференциал пять сателлитов вместо четырех). Ожидаемо низкая эффективность вязкостных муфт по сравнению с гидромеханическими отразилась на эксплуатационных характеристиках и в этом случае.
К середине 2000-х развитие технологий позволило полностью отказаться от вискомуфт, оставив все три дифференциала свободными (VSC+) - теперь блокировки эмулировались с помощью тормозной системы. Такое решение оставалось в производстве не слишком долго и уже спустя поколение все паркетники получили полный привод типа ATC.
Вообще, с активным внедрением систем стабилизации (у японских марок - со второй половины 2000-х) и появлением эмуляции блокировок межколесных дифференциалов с помощью тормозов, в мире начался новый этап развития полного привода. У некоторых производителей связка подключаемого 4WD и ESP дает лучший эффект, чем даже некоторые варианты классического постоянного полного привода с излишне "мягкой" блокировкой центра или ее эмуляцией. Но не в случае Toyota - сравнивая реальное поведение современных паркетников разных марок нужно признать - тойотовские настройки подключаемого полного привода и эмуляции межколесных блокировок являются крайне неудачными. Некоторые качественные улучшения здесь наметились только с выходом новых моделей в самом конце 2010-х.
Не лучшим образом отразился на возможностях полного привода отказ от автоматов в пользу вариаторов, постепенно идущий с середины 2000-х (моноприводные версии получали их еще раньше). Если для легких машин младших классов это не так принципиально, то для минивэнов и, тем более, кроссоверов именно вариатор становится наиболее узким, уязвимым и дорогим местом в цепи передачи мощности от двигателя к колесам.
Еще один тип условно полного привода, известный еще с 2001-го, сформировали многочисленные гибридные модели (E-4WD). При внешней заманчивости идеи, красивых цифрах и графиках крутящего момента заднего электромотора, в реальности тяговые возможности не оправдали ожиданий - по эффективности E-4WD не дотягивает даже до ATC аналогичных не-гибридных моделей.
Читайте также: