
Что за переключатель на экране парктроника
Обновлено: 06.07.2024
Припарковаться в условиях большого города бывает непросто даже профессиональным водителям. Запарковать автомобиль без повреждений в условиях ограниченного пространства поможет парковочный радар (он же парктроник).
Как работает парктроник? На бортах автомобиля (обычно на переднем и заднем бампере, иногда и по бокам) крепятся датчики, они сигнализируют о расстоянии до препятствия, информация об этом выдаётся на дисплее или в виде звукового сигнала.
Предлагаем рассмотреть устройство и принцип работы парктроника.
Устройство парктроника
- Ультразвуковых датчиков;
- Блока управления;
- Системы выведения данных (это может быть дисплей или небольшие динамики, встроенные в блок управления).
Немного про устройство датчика парктроника. Он может быть врезным или накладным, с проводным или беспроводным способом подключения. Беспроводное соединение позволяет не тянуть провода через весь салон, однако и стоят такие устройства куда дороже.
Модели с дисплеем в комплекте, как у ParkAWay E-6W-D, значительно удобнее в использовании. Экран позволяет очно контролировать приближение препятствия.
Принцип работы пактроника
Принцип работы датчика парктроника довольно прост. Закрепленные элементы посылают ультразвуковой импульс. Он отражается от ближайшего препятствия и возвращается обратно. Блок управления определяет время за которое вернулся отраженный сигнал и уже, исходя из этого, рассчитывает и выдаёт информацию о расстоянии до ближайшего объекта. Данные выводятся на дисплей гаджета или в виде звукового сигнала в зависимости от конкретной модели.
Ещё одна функция блока управления – тестирование и самодиагностика работы системы. В случае поломки он подаст звуковой сигнал, говорящий о том, что устройство вышло из строя.
В зависимости от места размещения ультразвуковых элементов радары парковки могут быть передними и задними. Как работает передний парктроник? Передний радар парковки подразумевает расположение датчиков на переднем и заднем бампере, чаще всего в комплекте идёт шесть и более чувствительных элементов, четыре из них устанавливаются сзади, два оставшихся спереди. Принцип его функционирования полностью идентичен работе системы с задним расположением. В некоторых устройствах есть возможность переключения между приёмом сигналов только передних или только задних чувствительных элементов.
Как пользоваться парктроником

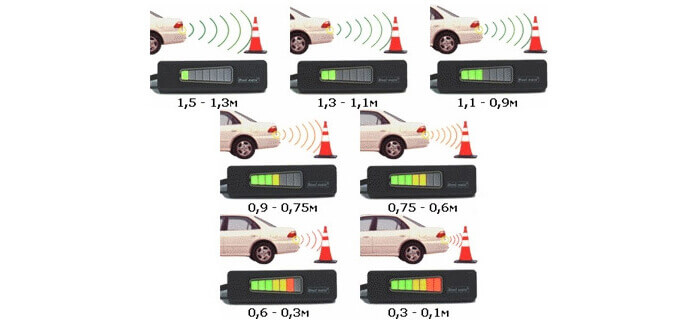
Использовать парковочный радар достаточно просто. Важно, чтобы датчики были правильно установлены, точно в вертикальной плоскости, в ином случае устройство может воспринимать асфальт, как препятствие и сигнализировать о нём. В случае, если радар парковки не оснащён экраном (как модель ParkAWay E-4G-ZV), он будет сигнализировать о приближающемся препятствии с помощью звука. Чем оно ближе, тем громче будет звук бипера. Если расстояние достигло критической отметки (то есть 25-30 см), звук становится непрерывным.
Что показывает дисплей парктроника? Это зависит от типа экрана радара. Одними из самых распространенных и недорогих моделей являются устройства, оснащённые светодиодным дисплеем, меняющим цвет (речь идёт, например, о ParkAWay E-4B-SH). Если экран загорается зелёным светом, это сигнализирует о наличии препятствия, по мере приближения к нему, он становится красным. Дополнительно могут отображаться цифры, указывающие расстояние до объекта в метрах. Радары, оснащенные ЖК-экраном, стоят дороже. Дополнительно они могут быть оснащены камерой заднего вида.
Как итог всему вышесказанному, можно сказать, что наиболее приемлемой моделью парковочного радара можно считать вариант с 4-6 датчиками и светодиодным дисплеем.
Удачи на дорогах!
Как работает парковочный радар?
Парктроник представляет собой сложную электронную систему, состоящую из нескольких основных элементов:
- блок управления и обработки сигналов;
- ультразвуковые датчики, вмонтированные в элементы кузова машины (как правило, передний и задний бампер);
- устройство звукового и визуального оповещения водителя.
Каждый датчик непрерывно посылает ультразвуковой сигнал, отражаемый поверхностями окружающих предметов. Если препятствие находится на близком расстоянии, прибор улавливает отражение и передает информацию контроллеру блока управления. Последний определяет дальность до препятствия по длине волны и скорости отклика, после чего отдает соответствующую команду звуковому устройству и дисплею.
Как работает парктроник простейшей конструкции:
- В заднем бампере автомобиля установлены два датчика, распространяющие ультразвук в секторе охвата примерно 45° перед собой.
- Когда вы сдаете назад и приближаетесь к какому-либо препятствию на 2 м, электроника подает первый звуковой сигнал.
- По мере приближения к предмету сигнал раздается чаще, а на расстоянии 30 см до поверхности становится непрерывным.
Ремонтные шипы для покрышек
В некоторых моделях авто неприятный звук зуммера заменен на голосовое оповещение, подсказывающее, сколько метров осталось до столкновения.
В бюджетной версии прибора реализована визуальная индикация посредством простого дисплея, на котором зажигаются полоски различной высоты. Чем ближе поверхность предмета, тем больше на экране вспыхивает полосок. Когда расстояние сокращается до критического, индикация отражается красным цветом.
В процессе езды по улицам города к машине часто приближаются другие участники движения (особенно в пробках). Чтобы не нервировать водителя бесполезным гудением, парктроник активируется после включения задней передачи.
В процессе езды по улицам города к машине часто приближаются другие участники движения (особенно в пробках). Чтобы не нервировать водителя бесполезным гудением, парктроник активируется после включения задней передачи.
Принцип работы парктроника, основанный на отражении ультразвуковых сигналов, давно используется в радарах дорожной патрульной службы. По длине волны и быстроте отклика прибор вычисляет не только расстояние до объекта, но и скорость движения.
Разновидности систем
Поэтому на современных авто устанавливаются следующие виды парковочных радаров:
Примечание. Чтобы звуковые либо голосовые сигналы не отвлекали автолюбителя в процессе движения, реализовано отключение группы следящих приборов, а в некоторых модификациях можно деактивировать один определенный датчик парктроника.
Экран со шкалой не дает водителю четкую картину происходящего позади и впереди транспортного средства. Он индицирует приближение к препятствию и сигнализирует, когда расстояние до поверхности предмета становится опасным. Полную картину позволяет видеть жидкокристаллический дисплей, установленный на центральной консоли многих современных автомобилей.
Изображение дисплей получает как минимум от двух камер, совмещенных с ультразвуковыми датчиками. На картинку накладывается сетка разметки, по которой шофер легко определяет оставшееся до объекта расстояние. Движение задним ходом также сопровождается голосовыми подсказками (функция отключается при необходимости). Парктроник устроен таким образом, чтобы активироваться после перехода на заднюю скорость, во время движения система не функционирует.
Новейшие модификации электронных устройств наделены несколькими дополнительными функциями
- на экране видна не только картинка с наложенной сеткой, но и траектория движения автомобиля;
- вместо дисплея изображение выводится прямо на лобовое стекло (так называемая проекция), водителю не нужно переводить взгляд с дороги на экран;
- отображение различных полезных данных – даты, текущего времени, километража и температуры на улице.
Рекомендации по выбору и установке парктроника
На бюджетных моделях легковых авто производители не предусматривают парковочных радаров. Это не является проблемой для автолюбителя, беспокоящегося о безопасном вождении: парктроник можно купить и смонтировать самостоятельно. Необходимо приобрести установочный комплект, куда входят датчики, небольшой выносной дисплей и электронный блок управления с проводами.
Примечание. Экран в центральной консоли встречается на многих машинах, не оборудованных парковочной электроникой. Для подключения дисплея к контроллеру придется обращаться в дилерский автосервис – сделать это самостоятельно довольно сложно. Проще поставить выносной индикатор.
При выборе парктроника с ультразвуковым принципом действия учтите следующие рекомендации:
- Существуют комплекты с накладными (приклеиваемыми) и врезными датчиками. Лучше подобрать второй вариант, хотя подобный набор стоит дороже. Практика показывает, что дешевые наклеиваемые приборы нередко отпадают и отрываются.
- Берите комплект, включающий не менее 4 ультразвуковых сканеров, устанавливаемых в задний обвес. Если хотите контролировать пространство спереди транспортного средства, покупайте набор из шести датчиков.
- Всегда актуальный совет: старайтесь не приобретать дешевые изделия, изготовленные в Китайской Республике.
Перед монтажом деталей изучите инструкцию и схему, прилагаемую к установочному комплекту . Подготовьте дрель с коронным сверлом, с помощью которого делаются аккуратные отверстия под каждый датчик парктроника. В процессе подключения может понадобиться тестер либо мультиметр для прозвонки проводов.
Наиболее сложный момент – высверливание отверстий и крепление ультразвуковых элементов. В идеале нужно снять бампер, разметить точки крепления с интервалом 30–40 см и выполнить отверстия. Соблюдайте направление сверления снаружи – внутрь, дабы минимально цеплять лакокрасочное покрытие. Затем прикрепите датчики и поставьте обвес на авто.
Следующие шаги – установка индикатора с электронным блоком и прокладка проводов. Размещение указанных элементов индивидуально для каждой марки авто, поэтому единственная рекомендация – закрепите дисплей в удобном месте, чтобы он не мешал обзору, а контроллер запрячьте под торпедо. Проводку размещайте под напольным покрытием
Выбор пал на блок Denso 188100-2410, как на самый распространенный. Я уже знал, что блок требует наличия шести датчиков (4 угловых и 2 задних), я же не собирался ставить 2 угловых передних и осознавал, что блок будет яростно сопротивляться отсутствию передней пары (в документации были описаны соответствующие ошибки). Но что казалось проще? Как он может определять отсутствие датчиков? Да разве что по сопротивлению нагрузки, подумалось мне, ничего страшного — подкинем ему резисторы для эмуляции. И поиски комплекта начались.
Как работает парктроник
Думаю, общая идея совершенно очевидна любому человеку с техническим образованием. Блок генерирует пачку импульсов, частота которых находится в ультразвуковом диапазоне. Ну чтобы не шокировать звуками окружающих людей, а о летучих мышах, дельфинах и прочих более продвинутых организмах разработчики, как правило, не задумываются.

Так как датчиков несколько и оценивается расстояние для каждого из них отдельно, чтобы не ловить отражения сигналов испускаемых соседними датчиками, пачки импульсов для них разнесены во времени. Показаны сигналы только для двух передних угловых.

После отправки пачки блок ждет отражения и, ориентируясь по времени распространения, оценивает расстояние до препятствия.

На осциллограмме видно отраженную пачку импульсов 1 через приблизительно 1.3мс, что при скорости распространения звука в 330 м/c дает примерно 430мм, то есть с допустимой точностью соответствует удвоенному расстоянию до объекта в условиях эксперимента (около 20см на глаз). Но что же еще видно на этой осциллограмме? Если подключен датчик, то сразу после пачки импульсов, сгенерированной блоком, есть эхо 2. А если датчик не подключен, то на первой осциллограмме в тексте видно, что этого локального эха нет. Как оказалось, вот по этому эху блок и определяет наличие и условную исправность датчика.
Как его обмануть
Ну теперь-то все понятно и очевидно, начнем. Нам необходимо сформировать эхо приблизительно известной амплитуды и приблизительно известной длительности. Сделать это надо как можно проще, дешевле, так чтобы сразу по двум каналам, и так, чтобы не было нужды в дополнительном питании (чтобы подключение полностью повторяло родные датчики).
В голову пришла вот такая схема (изображение кликабельно) на пару каналов на одном из самых дешевых микроконтроллеров.

На схеме, как мне кажется, все достаточно очевидно и понятно, если у кого-то будут вопросы или предложения, милости прошу в комментарии.
Потому как городить что-то на макетках и проводах в автомобиль — не комильфо, да и наши китайские друзья (дай Бог им здоровья и сил в борьбе с вирусом) уже так легко, быстро, удобно и недорого делают платы, была спроектирована и заказана, на одном из известных сайтов, плата.


P.S. Блок успокоился и больше не требует подключить недостающие датчики, а весь комплект ждет наступления теплых дней для установки.
В попытках свести все жизненные рабочие показатели своего автомобиля на один экран головного устройства дошла очередь и до подключения парктроника. Многие возразят — ведь даже у дешевых парктроников есть свой экранчик, зачем выводить данные куда-то ещё? Да просто лишний экранчик в салоне ставить не хочется, и покопаться в железе повод есть…
В статье постараюсь описать приёмы и инструменты для реверс-инжиниринга недокументированного протокола обмена двух железок между собой.
Из содержания некоторых публикаций, создаётся впечатление, что, во-первых, стоит выбирать парктроник с радиоканалом между основным блоком и экраном, и во-вторых, ничего сложного в протоколах обмена не ожидается. Хм… ну да. Правдой это оказалось наполовину.
Шаг первый. Вскрытие и считывание посылаемых данных

Вот такую повторяющуюся посылку шлёт основной блок сразу при подаче питания. При внимательном её рассмотрении можно сделать крайне неочевидный вывод о том, что посылка состоит из трёх частей:
Шаг второй. Декодирование ручками
10011100 10011100 10011101 01000100
10011100 10011100 10010011 01001100
10011100 10011110 01011101 01000100
10011100 10011110 01010011 01001100
Попробуем теперь выставить перед датчиком A (отключив B) препятствие на расстоянии, скажем, 90 см:
10011100 10011100 10011111 01000110
Тем не менее, дальше становится понятно, что вручную с показаний осциллографа срисовывать эти биты тяжело и велика вероятность ошибиться. Поэтому…
Шаг третий. Декодирование ножками в микроконтроллере
У нас есть микроконтроллер. Ардуино или просто AVR на макетке, неважно. Он у нас есть, кому как не ему собирать все данные для головного устройства. Поэтому самое время написать программку для декодирования посылки от парктроника и передачи этой посылки через терминалку в компьютер для упрощения дальнейшего процесса реверсинга.
Поскольку уровень сигналов от парктроника составляет стандартные 5 вольт, то подключение к AVRке для отладки очень простое — проводом на любую неспециализированную ножку (хмм… может я зря зачеркнул в заголовке?).
Исходник программы доступен на гитхабе. Декодированием занимается функция-обработчик прерывания PCINT3_vect в строке 119 и далее. Остальная часть программы делает много других интересных штук, может быть когда-нибудь я и про это напишу статью. А пока опишу вкратце алгоритм декодирования посылки от парктроника.
У нынешних AVRок почти на каждую ногу можно повесить прерывание, которое будет срабатывать каждый раз при изменении уровня на входе. Т.е. каждый раз при переходе от 0 до 5 вольт и каждый раз при переходе обратно от 5 до 0. Таким образом, достаточно при помощи таймера засекать время между срабатываниями прерывания и фиксировать внутреннее состояние. Состояний может быть несколько: ожидание первых 5 импульсов, ожидание широкого импульса, ожидание паузы, ожидание первых 16 бит (с последующим декодированием в зависимости от длительности импульса), ожидание паузы, ожидание вторых 16 бит, ожидание финального импульса, переход в начальное состояние. Причём всё это реализовано в обработчике прерывания, отнимает каждый раз буквально считанные такты и совсем не занимает главный цикл (правда, занимает отдельный таймер, но это исправимо).
Получившееся устройство по UART выдаёт в терминалку компьютера декодированные значения непосредственно в виде 4х байт. Для упрощения последующего анализа открываем Excel и пишем макрос:
генерирующий из 4 шестнадцатеричных байт вот такое (разноцветие и подписи, конечно, я уже добавил сам):

Обладая всем вышеописанным инструментарием, опытным путём получаем таблицу по датчику A:

- Последние 4 бита — десятки сантиметров датчика A. Причём если промоделировать расстояния вплоть до нуля, получится, что нулю десятков сантиметров соответствует 1111 и далее по убывающей, 10+ см = 1110, 20+ см = 1101, 30+ см = 1100 и т.д. вплоть до 0011, соответствующего 130+ см.
- Отмеченные бледно-розовым два столбца по 2 бита соответствуют единицам сантиметров (заметьте, что для 105, 95 и 85 см биты одинаковы). Причём в первом столбце более старшие биты 4-битного значения. Принцип кодирования тот же: 0 см = 1111, 1 см = 1110 и т.д. вплоть до 9 см = 0110
- Первая контрольная сумма остаётся неизменной, а вот вторая меняется хитро. Столбец десятков сантиметров влияет на сумму непосредственно, а вот оба столбца единиц сантиметров — влияют только на старшие два бита контрольной суммы.

Очередь датчика C:

гоньфень джи рёнран суньзаой, то есть единицы сантиметров по-прежнему на своих местах.- Десятки сантиметров для датчика C закодированы в пяти битах, которые на этот раз вместе, хоть и принадлежат разным байтам (сиреневый и тёмносиреневый). Принцип кодирования аналогичен предыдущим датчикам.
- Первая контрольная сумма (первые 4 бита) чётко изменяется на единицу вместе с изменениями на единицу значения десятков сантиметров. Аналогично датчику B. Следовательно, предварительный вывод: в первую контрольную сумму входят значение десятков сантиметров датчика B и датчика C (вероятно, без пятого бита) и что-то ещё. Интуиция подсказывает, что это младшие 4 бита последнего байта. Проверим ниже.
По датчику D собирать подробную таблицу стало лениво, поэтому так:

что ж, все гипотезы подтвердились. Первые 4 бита последнего байта кодируют десятки сантиметров датчика D.
Для проверки промоделируем несколько сочетаний датчиков A и B:

да, всё совпадает.
На данном этапе мы можем полностью декодировать расстояния по каждому датчику, включая единицы сантиметров. И наличие/отсутствие датчиков. Может быть, этого достаточно? Хм. Кажется что-то ещё недораскопано…
Шаг четвёртый. Расчёт CRC (Chinese Redundancy Check)
- Их две, по 4 бита, находятся почему-то не в последнем, а в третьем байте.
- Каждая из них является простой арифметической суммой данных из других столбцов.
- Предположительно известна принадлежность некоторых бит к конкретным контрольным суммам.
Отметим известную на данный момент принадлежность на выборке каких-нибудь произвольных показаний:

попробуем просуммировать по первой строке, возьмём столбцы десятков сантиметров датчиков B, C и D:
1110 + 0111 + 0011 = 11000
хм, а контрольная сумма в третьем байте 0111. А что если минус один?
1110 + 0111 + 0011 — 1 = 10111
совпадает, если отбросить лишний бит. Проверим по другим строкам:
1110 + 0111 + 0011 — 1 = 10111 (ой, тут всё повторилось)
0101 + 0111 + 0011 — 1 = 0111 (тут без отбрасывания)
1111 + 1100 + 1100 — 1 = 100110 (тут аж два бита переполнилось)
0001 + 0101 + 0011 — 1 = 1000 (без отбрасывания)
ура, всё совпало!
У нас остались не отмеченные столбцы. Вероятно, они относятся ко второй контрольной сумме, поэтому попробуем просуммировать:
1010 + 1011 + 0011 = 11000
1110 + 0111 + 0101 = 11010
1110 + 0011 + 1000 = 11001
1111 + 1111 + 0111 = 100101
1111 + 1011 + 0111 = 100001
мда, маловато общего с второй контрольной суммой. Посмотрим, сколько нужно вычесть, чтобы совпало:
1010 + 1011 + 0011 — 10 = 10110
1110 + 0111 + 0101 — 10 = 11000
1110 + 0011 + 1000 — 11 = 10110
1111 + 1111 + 0111 — 01 = 100100
1111 + 1011 + 0111 — 11 = 11110
где-то я это уже видел… а, ну да, у первой контрольной суммы! Зависимость простая — от второй КС нужно отнять то, что мы отбросили как переполнение при расчёте первой КС, только xor'енное с 11. Т.е. отбрасывая 00 (ничего) от первой КС, от второй отнимаем 11 и т.д.
Уфф, вроде всё. Осталось два незадействованных бита, но они, похоже, всегда единицы.
Шаг пятый. Чистка радиоэфира
А вообще я не сторонник применения радиоканалов где попало. Эфир и так прилично загажен, так что работать это всё будет местами (географическими) довольно нестабильно. Поэтому займёмся тем, что выкинем из парктроника приёмник и передатчик, соединив базовый блок, блок индикации и наш микроконтроллер по проводам. Почему я упоминаю блок индикации, хотя не собирался его ставить? А из-за пищалки. Всё-таки передача от базового блока парктроника в наш микроконтроллер, там декодирование, затем пересылка в головное устройство, там снова декодирование и отрисовка внесёт некритичный, но заметный лаг в отображение расстояний. Поэтому блок индикации останется в недрах приборки и будет пищать заведомо быстрее (хотя в будущем, может быть, заставлю пищать свой микроконтроллер).
Можно было бы не париться и соединить все блоки проводочками прямо как в отладочном режиме, напрямую. Однако прокидывать через всю машину жалкие 5 вольт TTL, поверьте мне, не лучшая идея. Поэтому впаяем во все три устройства микросхемы MAX485, реализующие передачу по куда более надёжному интерфейсу RS-485. В общем как-то так (простите за неотмытый флюс). Базовый блок:

на месте белого кружка в правом верхнему углу платы стоял чип R433A, из его обвязки также удалён транзистор Q11 и резистор, вместо которого припаян проводок. А в свободном месте удалось расположить микросхемку так, что ножки попали на минусовой контакт и несколько других подходящих контактов. Поскольку базовый блок всегда является передатчиком, ножки DE и RE можно постоянно замкнуть на +5 вольт. Линии A и B интерфейса RS485 выведены на дополнительную клемму.

ну здесь вообще красота, MAX485 впаялась практически как родная вместо стоявшей микросхемы приёмника RF83C. Совпали ножки выхода данных DO и минусовая GND, ножки DE и RE, поскольку эта часть всегда приёмник, посажены на землю. Остальное потребовало всего одной перемычки.
Работает, как и прежде:

фотку собственного микроконтроллера, пожалуй, опубликую в статье про остальную часть функционала KMENevoBT с гитхаба.
Напоследок, код полного декодирования посылки от парктроника из отладочной программки на Delphi:
Шаг шестой. Выводы
Возможно, в какой-то момент стоило отказаться от дальнейших раскопок и заказать с Ebay тот же парктроник, который расковырял итальянец с форума по первой ссылке, но мне понравился сам парктроник. Он весьма быстро и точно работает. Пришлось добить, уже из принципа.
Что курили китайцы, разрабатывая такой вот протокол, непонятно.
Кстати, зная протокол обмена, можно применить этот парктроник не только на автомобиле, а, к примеру, на самодельном роботе. Да, для роботов есть отдельные ультразвуковые датчики, но тут их сразу четыре и читаются они одной ножкой ардуины, хоть и с задержкой в несколько миллисекунд.
Всем дочитавшим всего наилучшего!
Читайте также: